第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共8页仿真在机械运动系统中的应用1.摘要1.1背景与目的电路仿真和控制算法仿真已经广泛应用于变频器开发过程当中,但是负载特性描述的比较简单,通常为一般的恒定转矩负载,但是实际应用中机械负载的状况要复杂很多,为了准确评估变频器在不同工作条件下的性能,本研究报告的目的在于研究Saber中关于机械仿真的基本原理和方法,以及在公司变频器开发中的应用,实现通过仿真模拟不同负载条件下变频器工作状况,为性能优化提供参考
1.2关键词KCL,KVL,对偶,力,转矩,位移,角速度2.机械仿真的基本原理Saber是一种基于KCL定理和KVL定理进行仿真的仿真器,除了可以分析电路以外,它还可以对于流体,机械运动进行分析,其中对于机械物体运动的分析,可以被应用在变频器负载特性的分析当中
简单说明如下
2.1机械与电的对偶关系机械系统与电路分析的对象一样,可以分为支路和节点,一个器件两个端点之间是一个支路,而几个器件的连接点就是一个节点
两个节电之间的物理量之差被称为“AcrossVariable”,而穿过一个支路的物理量被称作“ThroughVariable”
对于电路仿真而言,“AcrossVariable”是某个节点的电压,“ThroughVariable”是某个支路的电流,而机械系统仿真中,“AcrossVariable”是节点的位移(或者转动角度,角速度),“ThroughVariable”是支路的力(或者转矩)
他们同样都满足KCL与KVL定理,具有物理意义上的对偶关系
简单说明如下
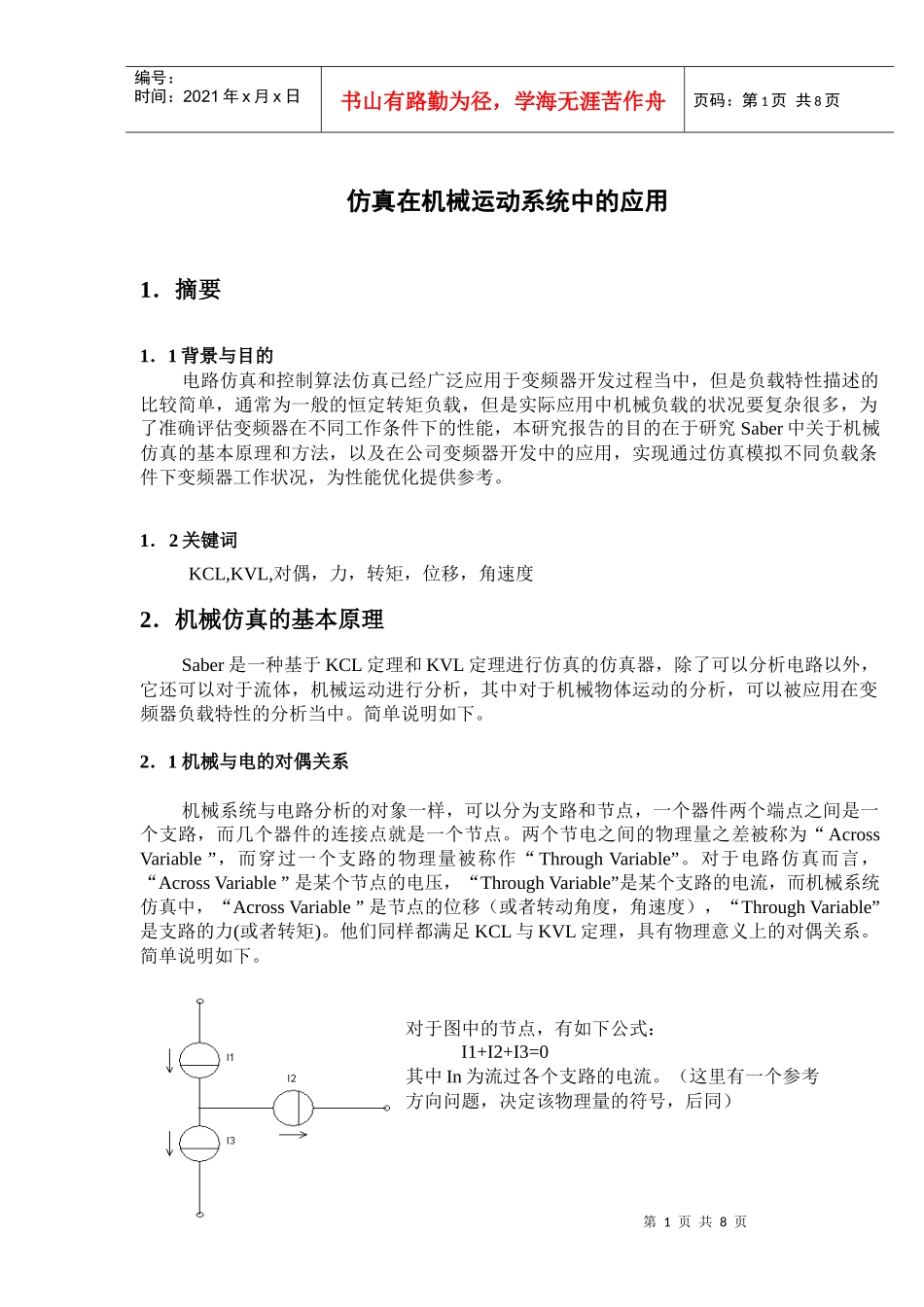
对于图中的节点,有如下公式:I1+I2+I3=0其中In为流过各个支路的电流
(这里有一个参考方向问题,决定该物理量的符号,后同)第2页共8页第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2