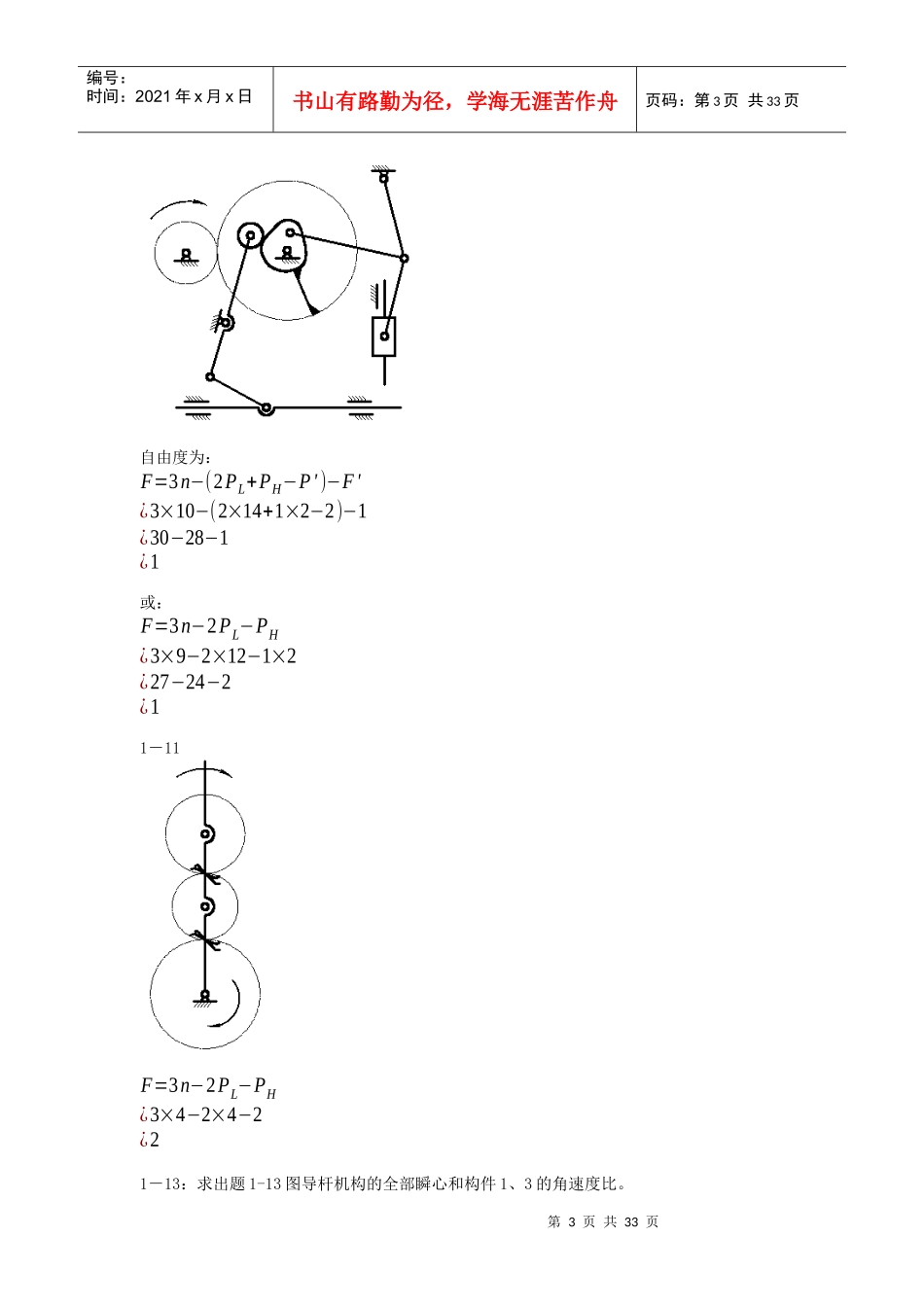
第1页共33页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共33页《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5第2页共33页第1页共33页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共33页自由度为:F=3n−(2PL+PH−P')−F'¿3×7−(2×9+1−0)−1¿21−19−1¿1或:F=3n−2PL−PH¿3×6−2×8−1¿11-6自由度为F=3n−(2PL+PH−P')−F'¿3×9−(2×12+1−0)−1¿1或:F=3n−2PL−PH¿3×8−2×11−1¿24−22−1¿11-10第3页共33页第2页共33页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共33页自由度为:F=3n−(2PL+PH−P')−F'¿3×10−(2×14+1×2−2)−1¿30−28−1¿1或:F=3n−2PL−PH¿3×9−2×12−1×2¿27−24−2¿11-11F=3n−2PL−PH¿3×4−2×4−2¿21-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比
第4页共33页第3页共33页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第4页共33页ω1×|P14P13|=ω3×|P34P13|ω1ω3=|P34P13||P14P13|=411-14:求出题1-14图正切机构的全部瞬心
设ω1=10rad/s,求构件3的速度v3
v3=vP13=ω1|P14P13|=10×200=2000mm/s1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比ω1/ω2
构件1、2的瞬心为P12第5页共33页