机械设计:常用的机械结构知识大全平面连杆机构的组成我们将机构中所有构件都在一平面或相互平行的平面内运动的机构称为平面机构
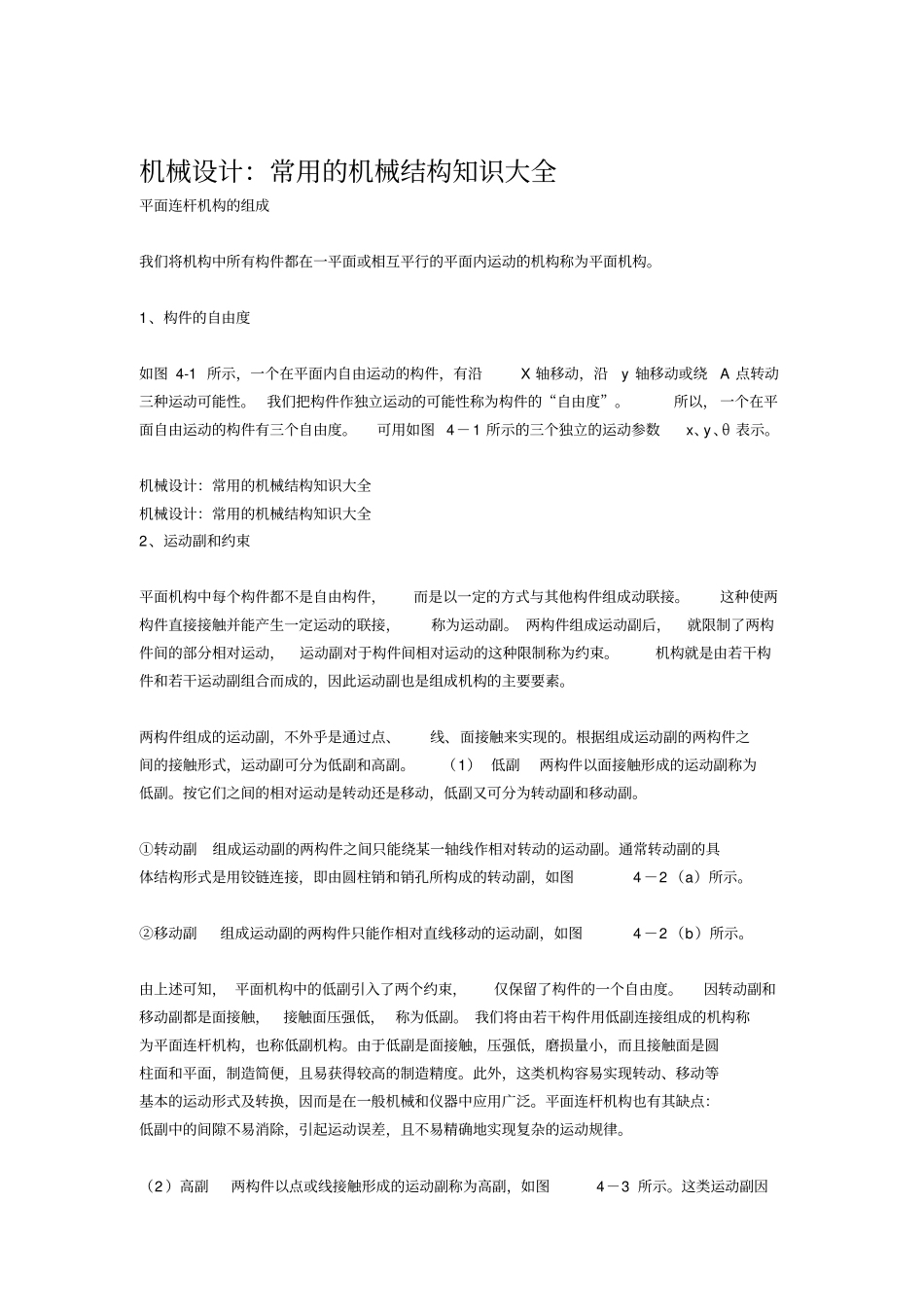
1、构件的自由度如图4-1所示,一个在平面内自由运动的构件,有沿X轴移动,沿y轴移动或绕A点转动三种运动可能性
我们把构件作独立运动的可能性称为构件的“自由度”
所以,一个在平面自由运动的构件有三个自由度
可用如图4-1所示的三个独立的运动参数x、y、θ表示
机械设计:常用的机械结构知识大全机械设计:常用的机械结构知识大全2、运动副和约束平面机构中每个构件都不是自由构件,而是以一定的方式与其他构件组成动联接
这种使两构件直接接触并能产生一定运动的联接,称为运动副
两构件组成运动副后,就限制了两构件间的部分相对运动,运动副对于构件间相对运动的这种限制称为约束
机构就是由若干构件和若干运动副组合而成的,因此运动副也是组成机构的主要要素
两构件组成的运动副,不外乎是通过点、线、面接触来实现的
根据组成运动副的两构件之间的接触形式,运动副可分为低副和高副
(1)低副两构件以面接触形成的运动副称为低副
按它们之间的相对运动是转动还是移动,低副又可分为转动副和移动副
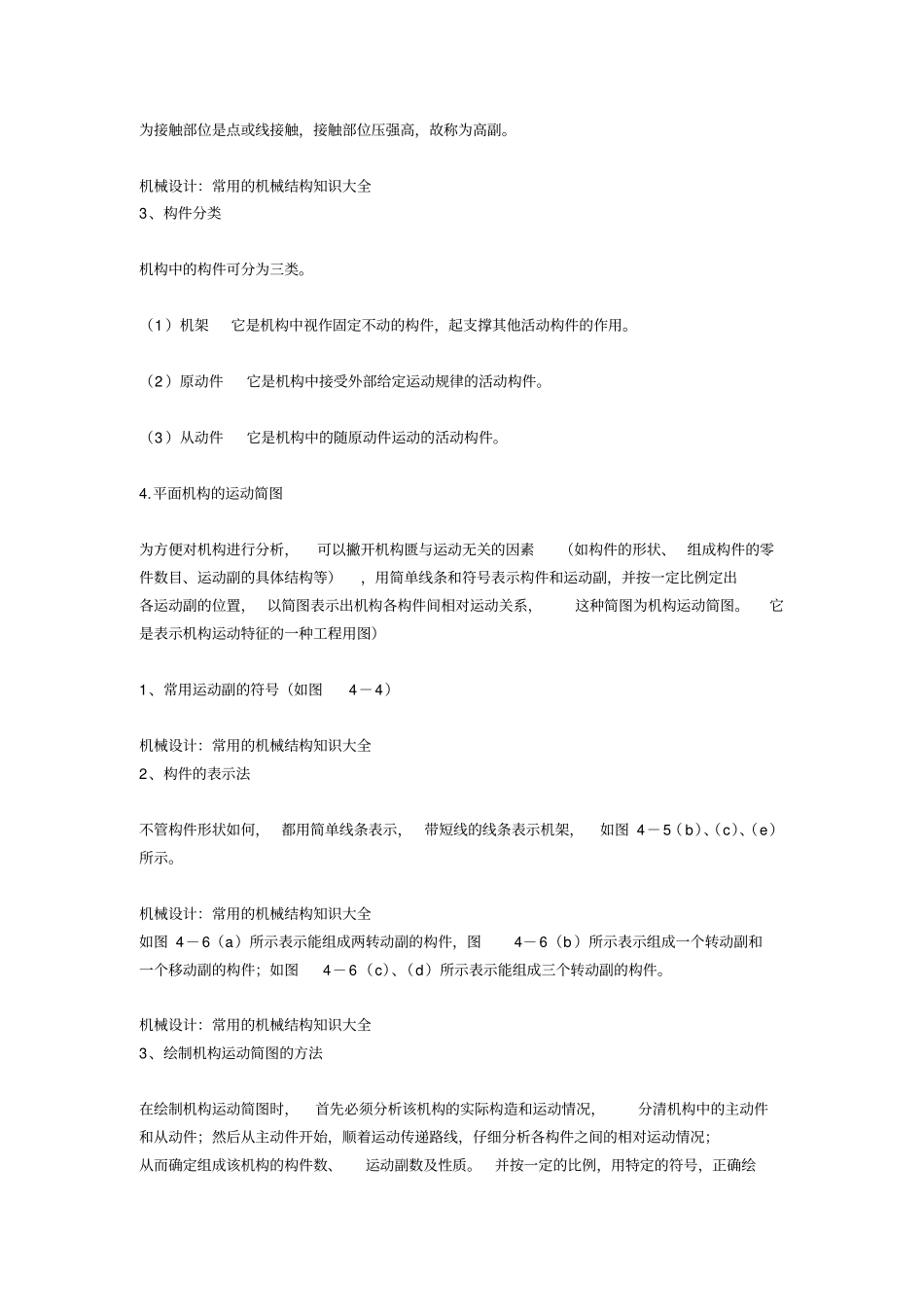
①转动副组成运动副的两构件之间只能绕某一轴线作相对转动的运动副
通常转动副的具体结构形式是用铰链连接,即由圆柱销和销孔所构成的转动副,如图4-2(a)所示
②移动副组成运动副的两构件只能作相对直线移动的运动副,如图4-2(b)所示
由上述可知,平面机构中的低副引入了两个约束,仅保留了构件的一个自由度
因转动副和移动副都是面接触,接触面压强低,称为低副
我们将由若干构件用低副连接组成的机构称为平面连杆机构,也称低副机构
由于低副是面接触,压强低,磨损量小,而且接触面是圆柱面和平面,制造简便,且易获得较高的制造精度
此外,这类机构容易实现转动、移动等基本的运动形式及转换,因而是在一般机械和仪器中应用广泛