实验三上中水箱液位串级控制系统实验一、实验目的1、了解复杂过程控制系统的构成
2、掌握复杂过程控制一—串级控制方法
3.掌握串级控制参数整定方法
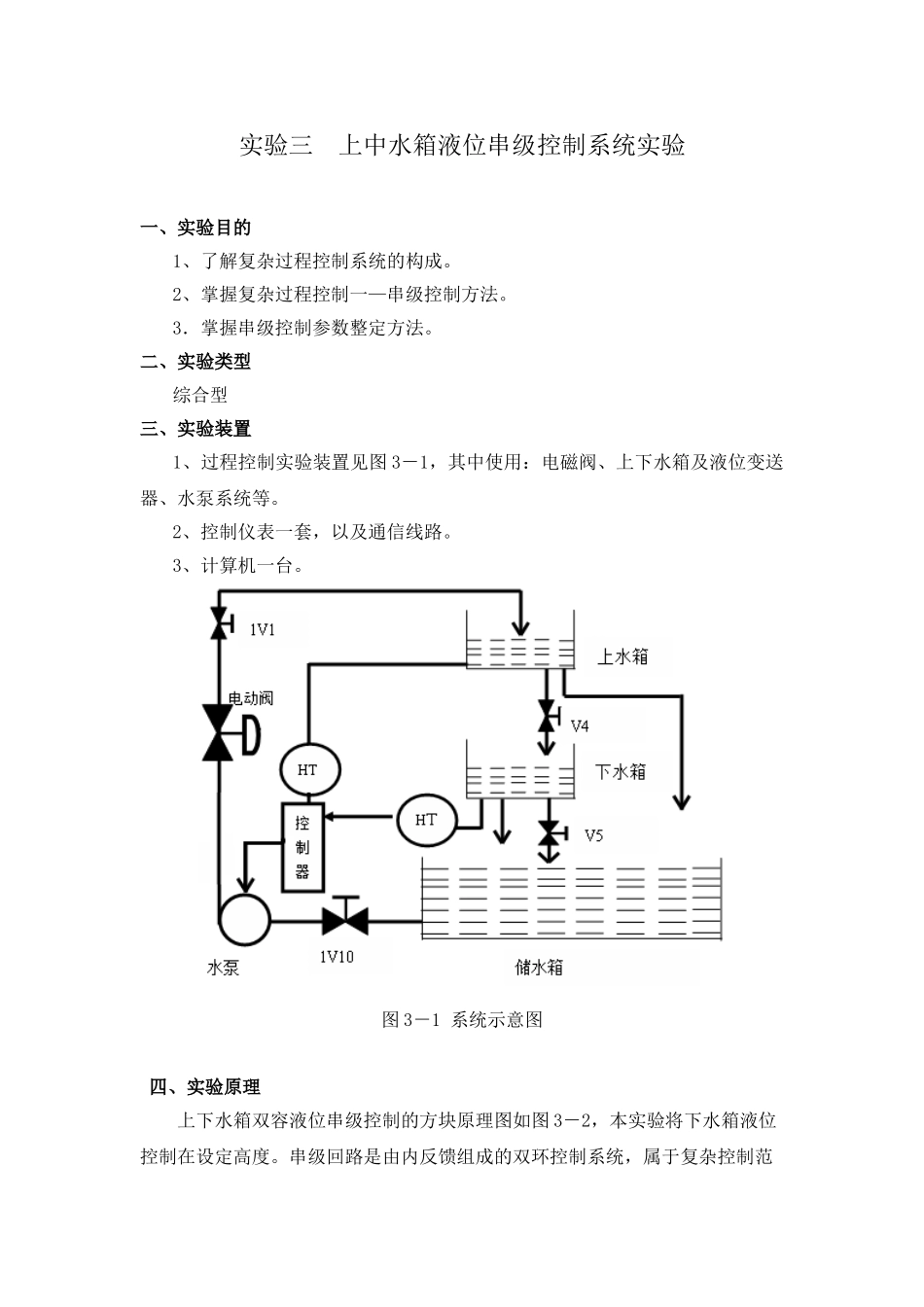
二、实验类型综合型三、实验装置1、过程控制实验装置见图3-1,其中使用:电磁阀、上下水箱及液位变送器、水泵系统等
2、控制仪表一套,以及通信线路
3、计算机一台
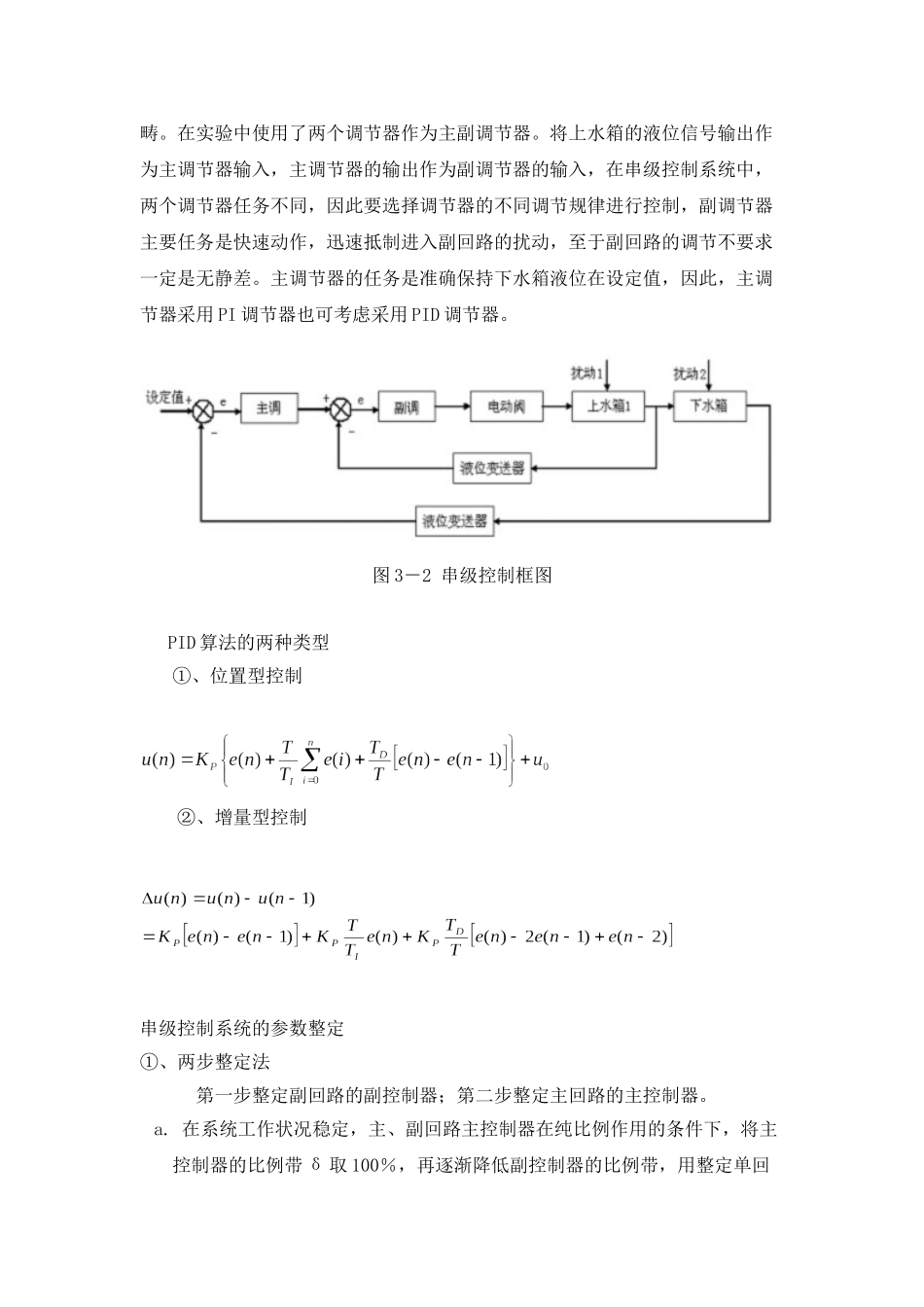
图3-1系统示意图四、实验原理上下水箱双容液位串级控制的方块原理图如图3-2,本实验将下水箱液位控制在设定高度
串级回路是由内反馈组成的双环控制系统,属于复杂控制范畴
在实验中使用了两个调节器作为主副调节器
将上水箱的液位信号输出作为主调节器输入,主调节器的输出作为副调节器的输入,在串级控制系统中,两个调节器任务不同,因此要选择调节器的不同调节规律进行控制,副调节器主要任务是快速动作,迅速抵制进入副回路的扰动,至于副回路的调节不要求一定是无静差
主调节器的任务是准确保持下水箱液位在设定值,因此,主调节器采用PI调节器也可考虑采用PID调节器
图3-2串级控制框图PID算法的两种类型①、位置型控制②、增量型控制串级控制系统的参数整定①、两步整定法第一步整定副回路的副控制器;第二步整定主回路的主控制器
在系统工作状况稳定,主、副回路主控制器在纯比例作用的条件下,将主控制器的比例带δ取100%,再逐渐降低副控制器的比例带,用整定单回路的方法来整定副回路
如用4:1衰减法来整定副回路,则求出副参数在4:1衰减时的副控制器比例带δ2S和操作周期T2S
使副控制比例带置于δ1S的数值上,逐渐降低主控制器的比例带δ1S,求出同样衰减比时主回路的过渡过程曲线,记录此时主控制器的比例带δ1S和操作周期T1S
将上述步骤中求出的δ1S、T1S、δ2S、T2S按所用的4:1衰减曲线的整定方法,求出主、副控制器的整定参数
按照“先副后主,先比例次积分后微分”的原则,将计算机得出的