车载摄像头技术的现在与未来在自动驾驶车辆中,感知系统主要由摄像头、毫米波雷达、激光雷达(可选,这里主要是怕被特斯拉的粉丝杠)等传感器构成
摄像头作为主要的环境感知传感器起着非常重要的作用,可以实现360
全面视觉感知,弥补雷达在物体识别上的缺陷,是最接近人类视觉的传感器
因此是车载摄像头是自动驾驶领域的关键设备之一
本文来自汽车智能网联技术青年专家程增木老师为我们带来车载摄像头的技术入门介绍、目前主流的车型车载摄像头搭载方案的优劣比较和未来车载摄像头的发展趋势
什么是车载摄像头
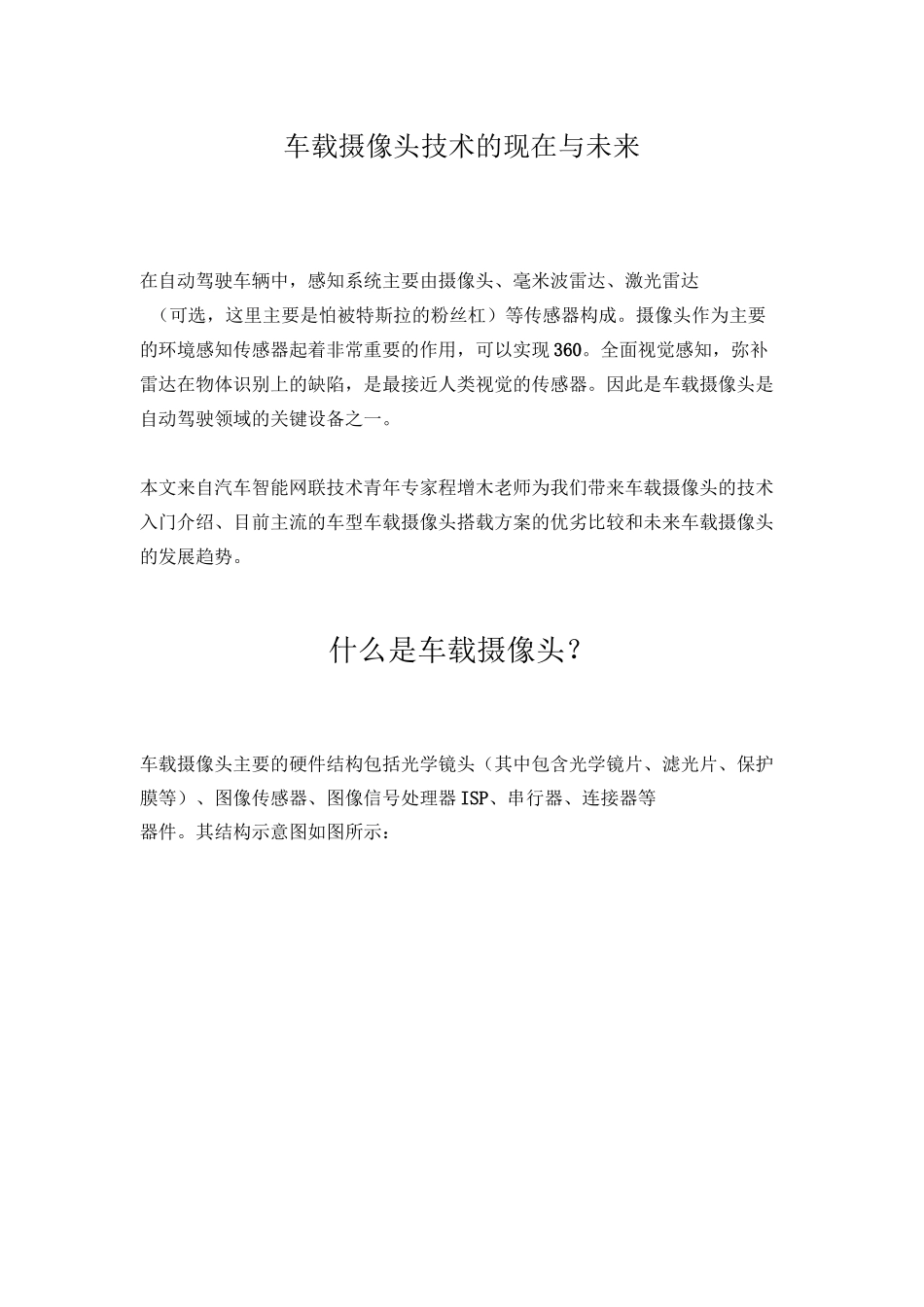
车载摄像头主要的硬件结构包括光学镜头(其中包含光学镜片、滤光片、保护膜等)、图像传感器、图像信号处理器ISP、串行器、连接器等器件
其结构示意图如图所示:车载摄像头的结构构成(图片来源:安森美半导体公司)光学镜头:负责聚焦光线,将视野中的物体投射到成像介质表面,根据成像效果的要求不同,可能要求多层光学镜片
滤光片可以将人眼看不到的光波段进行滤除,只留下人眼视野范围内的实际景物的可见光波段
图像传感器:图像传感器可以利用光电器件的光电转换功能将感光面上的光像转换为与光像成相应比例关系的电信号
主要分为CCD和CMOS两种
ISP图像信号处理器:主要使用硬件结构完成图像图传感器输入的图像视频源RAW格式数据的前处理,可转换为YCbCr等格式
还可以完成图像缩放、自动曝光、自动白平衡、自动聚焦等多种工作
串行器:将处理后的图像数据进行传输,可用于传输RGB、YUV等多种图像数据种类
连接器:用于连接固定摄像头
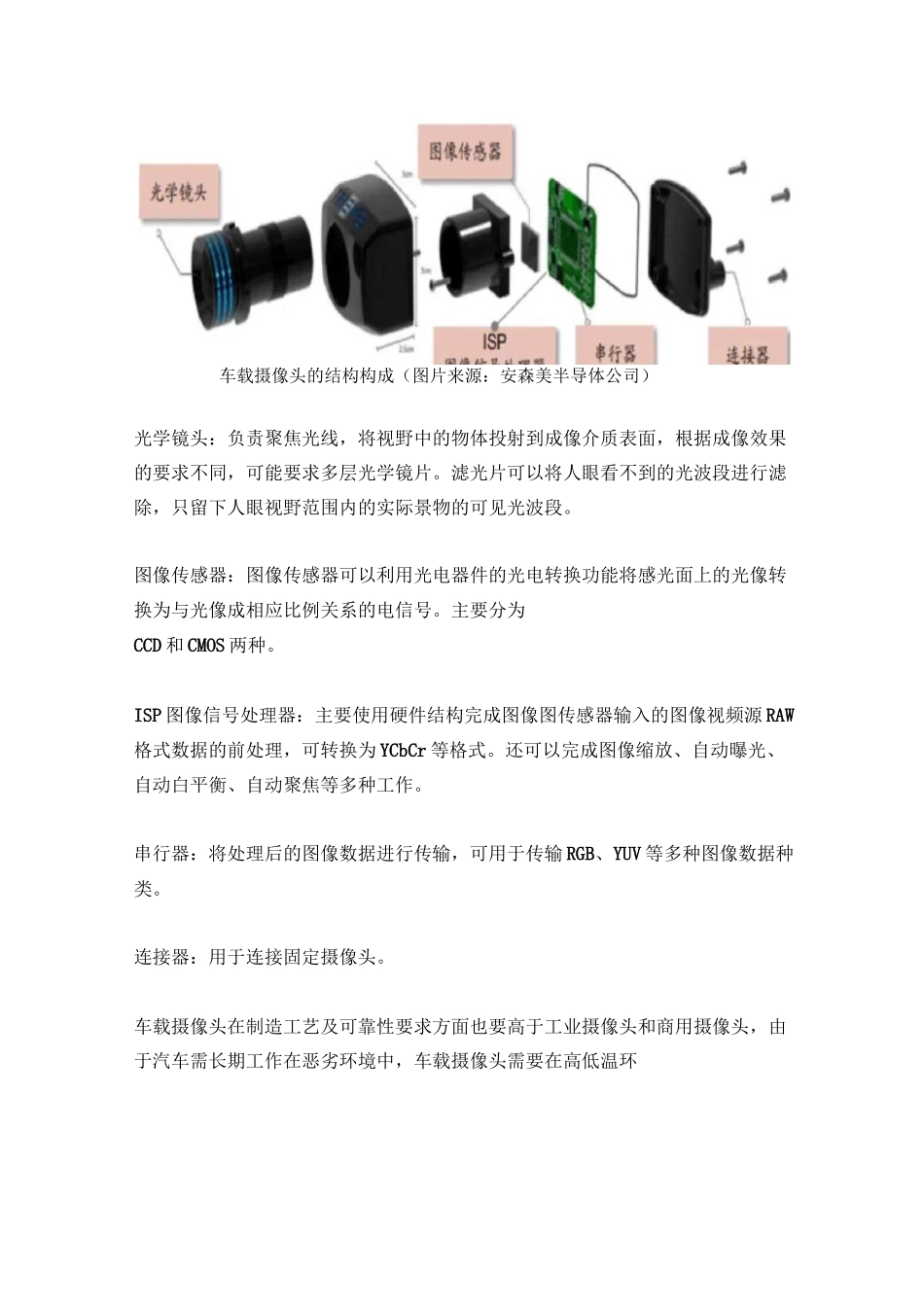
车载摄像头在制造工艺及可靠性要求方面也要高于工业摄像头和商用摄像头,由于汽车需长期工作在恶劣环境中,车载摄像头需要在高低温环境、强振动、高湿热等复杂工况环境下稳定工作,对于工艺制造方面的要求主要如下:工揺欢黒休蛊求-40-85cC師寿粘年及乩t防般级七为IP57肓遞肆满足PV魁要求满足PV輕要求耐久