自动控制原理课程设计概述用来精确地跟随或复现某个过程的反馈控制系统
又称随动系统
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化
位置指令与被控量可以是直线位移或角位移
随着工程技术的发展,出现了各种类型的位置随动系统
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线
伺服系统的精度主要决定于所用的测量元件的精度
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用
系统的原理图如图1-1所示
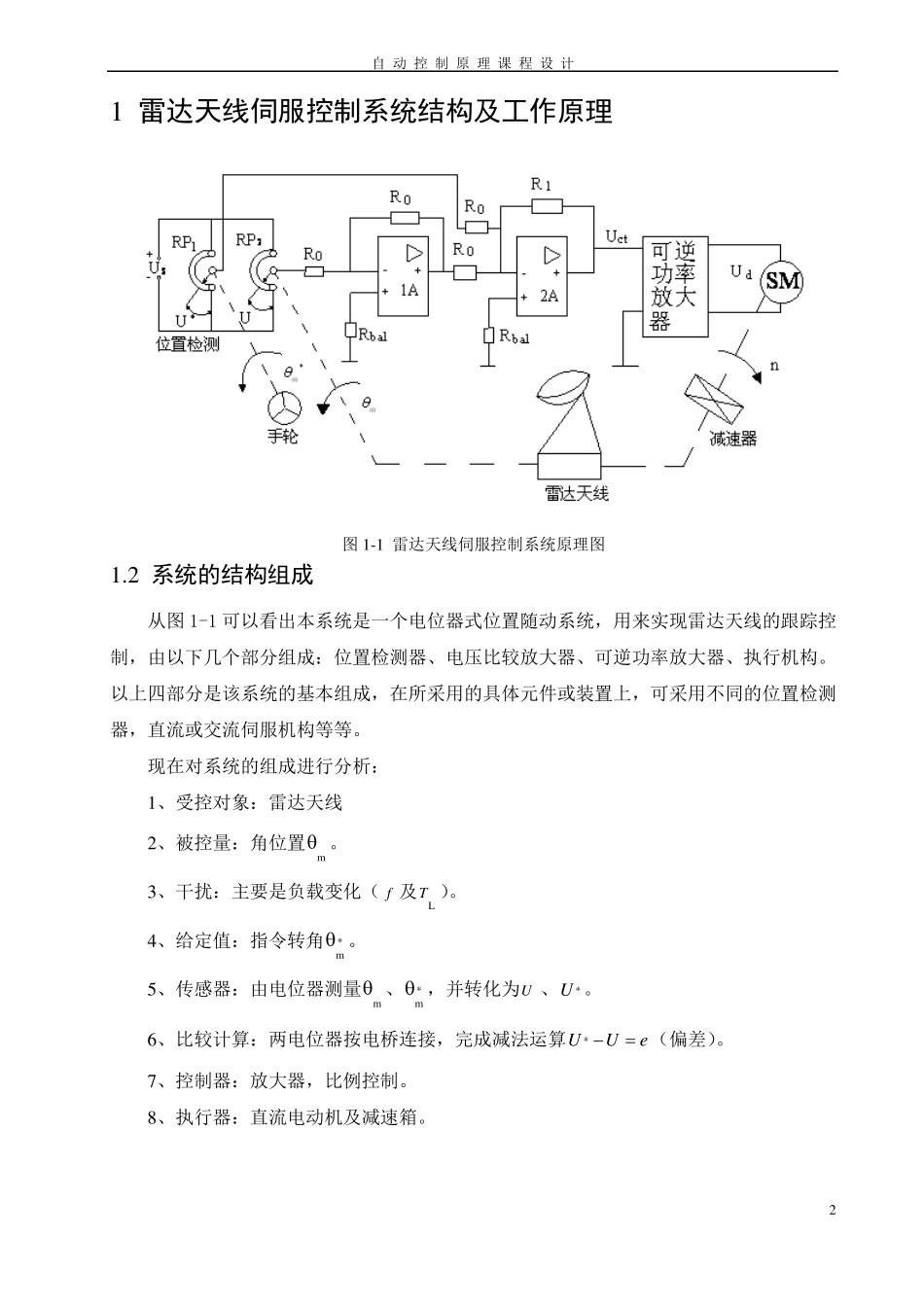
1自动控制原理课程设计1雷达天线伺服控制系统结构及工作原理图1-1雷达天线伺服控制系统原理图1
2系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m
3、干扰:主要是负载变化(f及TL