第四章连续控制系统的仿真4
1仿真模型的结构1
面向闭环系统微分方程(传递函数)的数字仿真方法:得到系统的闭环传递函数,再用Z变换法获得闭环系统的差分迭代格式,又称仿真模型;或者有微分方程组采用数值积分法、离散相似法离散成迭代格式后进行仿真
局限性:该方法要求用户上机前事先计算出闭环传递函数,在多回路系统中具有很大的局限性
开环系统往往有控制器、控制对象等多个环节组成,写出总的闭环传递函数后研究某个环节的参数变化对系统品质的影响不方便,特别是在多回路系统中研究小闭环中某环节参数变化对系统影响更麻烦;系统中含有非线性环节就写不出闭环传递函数
面向系统结构图的数字仿真将系统看作有许多典型环节组成,进行仿真时,将各个环节的参数以及各个环节的连接方式输入计算机让计算机求闭环系统的数值解
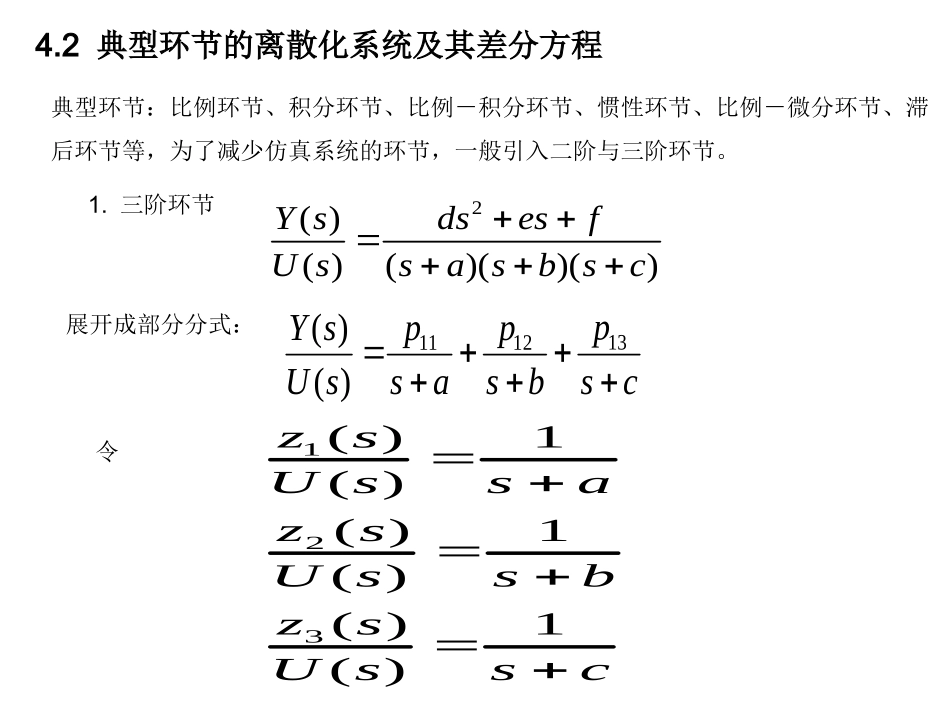
2典型环节的离散化系统及其差分方程典型环节:比例环节、积分环节、比例-积分环节、惯性环节、比例-微分环节、滞后环节等,为了减少仿真系统的环节,一般引入二阶与三阶环节
三阶环节2()()()()()YsdsesfUssasbsc131112()()pppYsUssasbsc展开成部分分式:令123()1()()1()()1()zsUssazsUssbzsUssc得到状态方程为ZAZBU其中00100,1001aAbBc输出方程为111122133222111213,,()()()()()()ypzpzpzdaaefdbbefdccefpppbacaabcbacbc其中(1)确定状态变量的初始值:由(1)得111122133(0)(0)(0)(0)ypzpzpz(2)112233zazuzbzuzczu对(1)式两边取导数得111122