已知被控对象为
假设系统给定为阶跃值r=30,采样时间为0
5s,系统初始值r(0)=0,试分别设计:(1)常规的PID控制器;(2)常规的模糊控制器;(3)模糊PID控制器
分别对上述3种控制器进行Matlab仿真,并计较控制效果
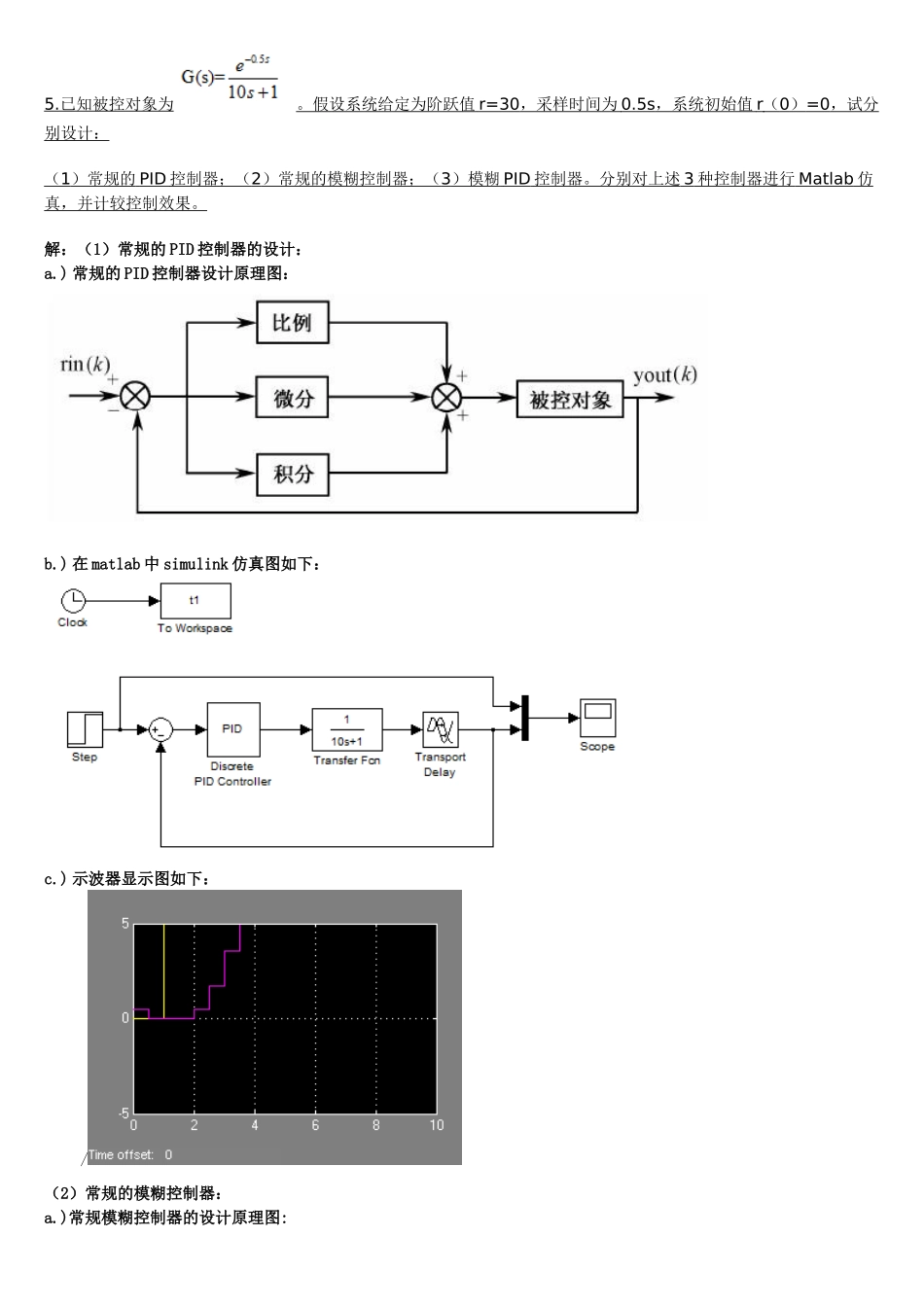
解:(1)常规的PID控制器的设计:a
)常规的PID控制器设计原理图:b
)在matlab中simulink仿真图如下:c
)示波器显示图如下:/(2)常规的模糊控制器:a
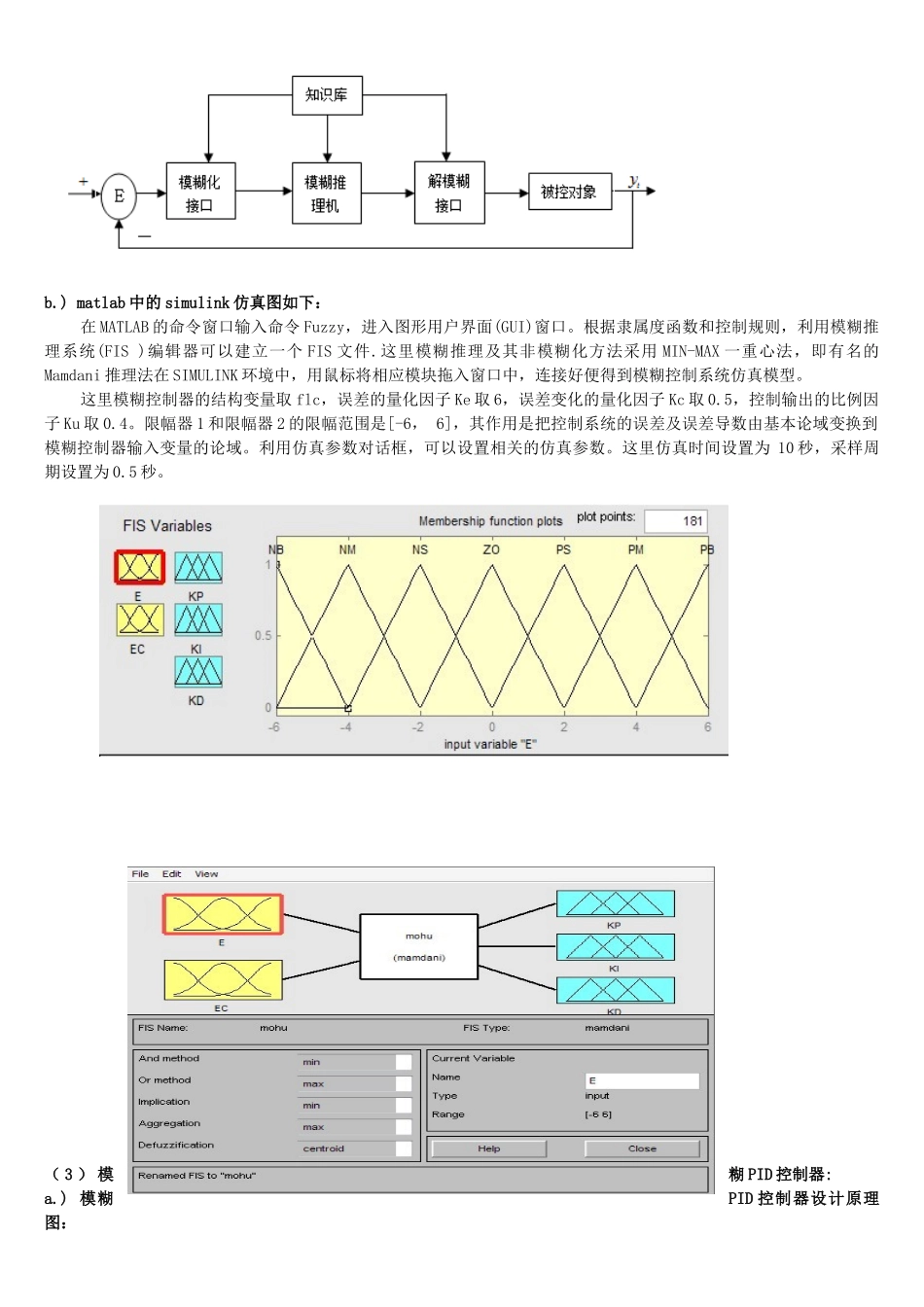
)常规模糊控制器的设计原理图:b
)matlab中的simulink仿真图如下:在MATLAB的命令窗口输入命令Fuzzy,进入图形用户界面(GUI)窗口
根据隶属度函数和控制规则,利用模糊推理系统(FIS)编辑器可以建立一个FIS文件
这里模糊推理及其非模糊化方法采用MIN-MAX一重心法,即有名的Mamdani推理法在SIMULINK环境中,用鼠标将相应模块拖入窗口中,连接好便得到模糊控制系统仿真模型
这里模糊控制器的结构变量取flc,误差的量化因子Ke取6,误差变化的量化因子Kc取0
5,控制输出的比例因子Ku取0
限幅器1和限幅器2的限幅范围是[-6,6],其作用是把控制系统的误差及误差导数由基本论域变换到模糊控制器输入变量的论域
利用仿真参数对话框,可以设置相关的仿真参数
这里仿真时间设置为10秒,采样周期设置为0
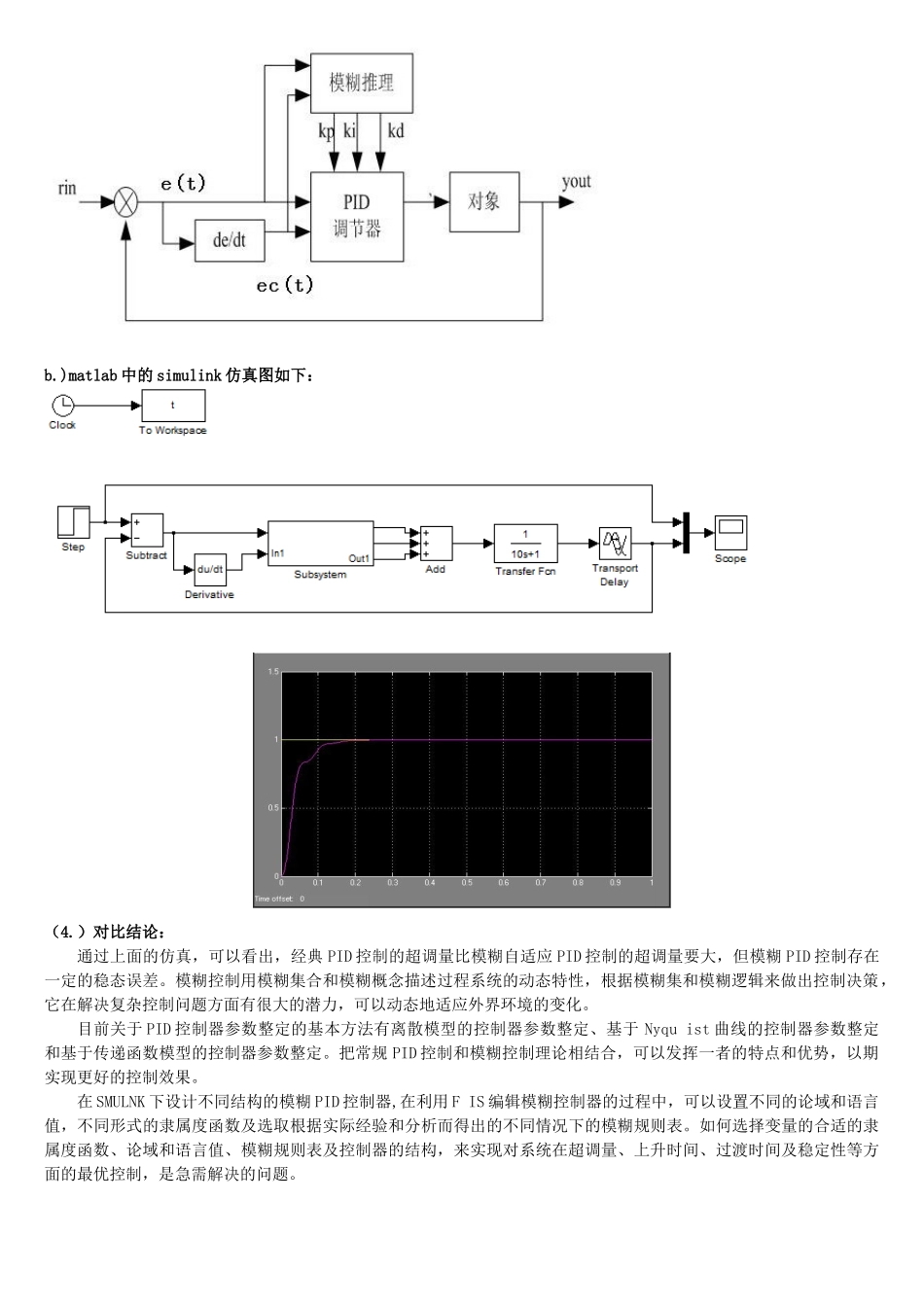
(3)模糊PID控制器:a
)模糊PID控制器设计原理图:b
)matlab中的simulink仿真图如下:(4
)对比结论:通过上面的仿真,可以看出,经典PID控制的超调量比模糊自适应PID控制的超调量要大,但模糊PID控制存在一定的稳态误差
模糊控制用模糊集合和模糊概念描述过程系统的动态特性,根据模糊集和模糊逻辑来做出控制决策,它在解决复杂控制问题方面有很大的潜力,可以动态地适应外界环境的变化
目前关于PID控制器参数整定的基本方法