FAUNC伺服电机更换后的单轴零点校正1
记录所需拆卸轴(伺服电机)的位置信息(见右上图,备注:本说明以J1为例),并在设备上做上标记(见右下画面
按MENU---0---POSITION进入如右上画面记录当前J1的数据(1)在设备上做上标记2
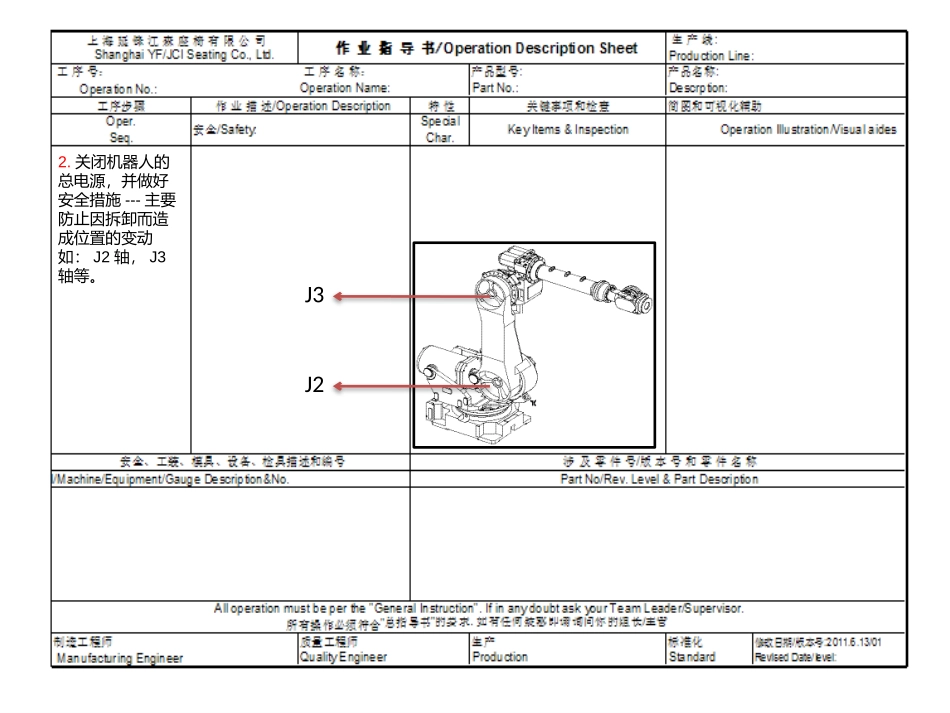
关闭机器人的总电源,并做好安全措施---主要防止因拆卸而造成位置的变动如:J2轴,J3轴等
拆下J1轴的伺服电机,并将新的伺服电机配套好机械部件后安装进机器人相应的位置
完成安装后,打开机器人的总电源,4
检查先前的标记位置是否变动,如有变动就需跳至第5步--4
如无就需记录轴J1的当前位置信息
检查位置是否变动4
记录当前J1的数据(2)5
重新上电后,会出现SRVO-062报警,按MENU---0---SYSTEM-TYPE-MASTER/CAL进入如右面的画面(备注:可通过修改变量$MASTER-ENB为0隐藏MASTER/CAL项)SRVO-062报警画面6
按F3(RES-PCA),之后按YES消除报警再按TP示教器上的RESET键复位报警7
断电重启或如右画面重启---按Fctn键---选择CYCLEPOWER并确认
机器人重启8
重启后,会出现SRVO-075报警,在JOINT模式下左右移动J1大于20°然后按下RESET键复位SRVO-075报警
在JOINT模式下将J1回到标记点位置(即J1=(2)
节中标记位置有变动,就需移动J1将标记对其机器人的刻度中点J1的数据(2)9
按MENU---0---SYSTEM-TYPE-MASTER/CAL进入如右面的画面,选择SINGLEAXISMASTER10
将J1的SEL修改为1,在将MSTRPOS值修改成为(1)值见步骤1,按F5(EXEC),按PREV键退出11
选择6CALIBRATE断电重启完成校正12