Smith补偿控制原理针对纯滞后系统闭环特征方程含的影响系统控制品质的纯滞后问题,1957年Smith提出了一种预估补偿控制方案,即在PID反馈控制基础上,引入一个预估补偿环节,使闭环特征方程不含有纯滞后项,以提高控制质量
如果能把图4-5中假想的变量B测量出来,那么就可以按照图4-6所示的那样,把B点信号反馈到控制器,这样就把纯滞后环节移到控制回路外边
图4-6反馈回路的理想结构示意图由图4-6可以得出闭环传递函数为Φ(z)=D(s)Gp(s)e−τs1+D(s)Gp(s)(4-27)由上式可见,由于反馈信号B没有延迟,闭环特征方程中不含有纯滞后项,所以系统的响应将会大大地改善
但是由于B点信号是一个不可测(假想)的信号,所以这种方案是无法实现的
为了实现上面的方案,假设构造了一个过程的模型,并按图4-7所示那样把控制量U(S)加到该模型上去
在图4-7中,如果模型是精确的,那么虽然假想的过程变量B是得不到的,但能够得到模型中的Bm
如果不存在建模误差和负荷扰动,那么Bm就会等于B,Em(s)=Y(s)−Ym(s)=0,可将Bm点信号作为反馈信号
但当有建模误差和负荷扰动时,则Em(s)=Y(s)−Ym(s)≠0,会降低过程的控制品质
为此,在图4-7中又用Em(s)实现第二条反馈回路,以弥补上述缺点
以上便是Smith预估器的控制策略
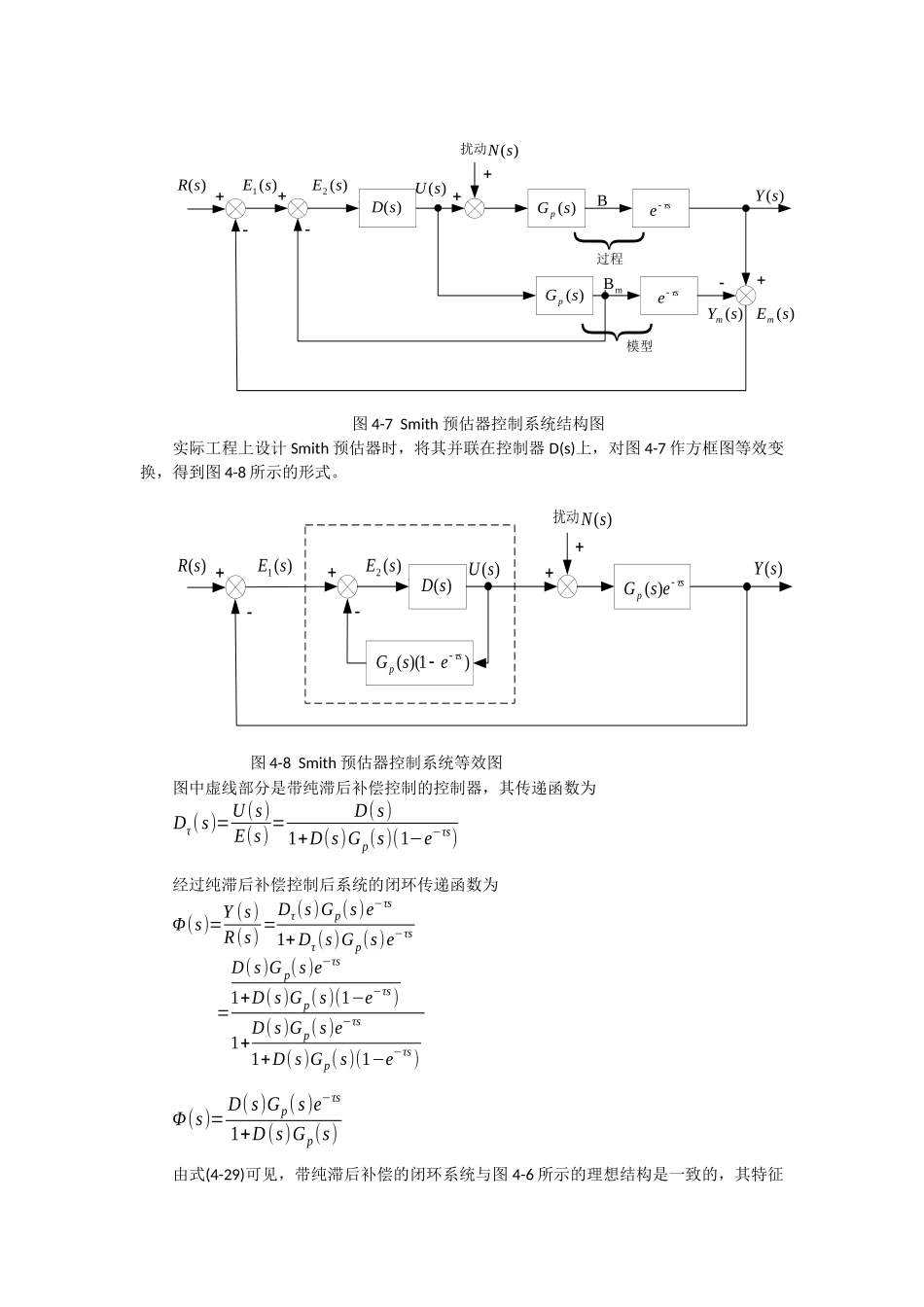
)(sR)(sEB)(sD)(sGpse扰动)(sN)(sE)(sU)(sY图4-7Smith预估器控制系统结构图实际工程上设计Smith预估器时,将其并联在控制器D(s)上,对图4-7作方框图等效变换,得到图4-8所示的形式
图4-8Smith预估器控制系统等效图图中虚线部分是带纯滞后补偿控制的控制器,其传递函数为Dτ(s)=U(s)E(s)=D(s)1+D(s)Gp(s)(1−e−τs)经过纯滞后补偿控制后系统的闭环传递函