ConirollerManipuloior
实习机器人型号:公司的型小翌机器人,属于多关节型实习项目名称:工业机器人训练教案编写:姜英实习地点:现代制造技术车间讲课时间:教案审定:工业机器人教学目的及要求:了解工业机器人的基础知识、应用和简单的工作过程教学重点:略教学难点:略教学内容:(结合实物讲解)
概述:机器人是典型的光机电一体化的高科技产品
工业机器人是目前技术上最成熟、应用最广泛的机器人
现在世界各国已装配了余万台工业机器人
工业机器人的应用使产品的质量更加可靠,生产线的柔性增加,企业适应市场的能力大大提咼
工业机器人的定义:工业机器人是指在工业中应用的一种可自动定位控制的,可重复编程的,多功能的、多自由度的、多用途的操作机
它能够搬运物料、零件,或者是操持工具,用以完成各种作业
工业机器人的分类:根据臂机构,按照其工作形态,可以分为•圆柱坐标型机器人•极坐标型机器人•直角坐标型机器人•多关节型机器人机器人的组成:ontroller:控制器
anplator:机械手
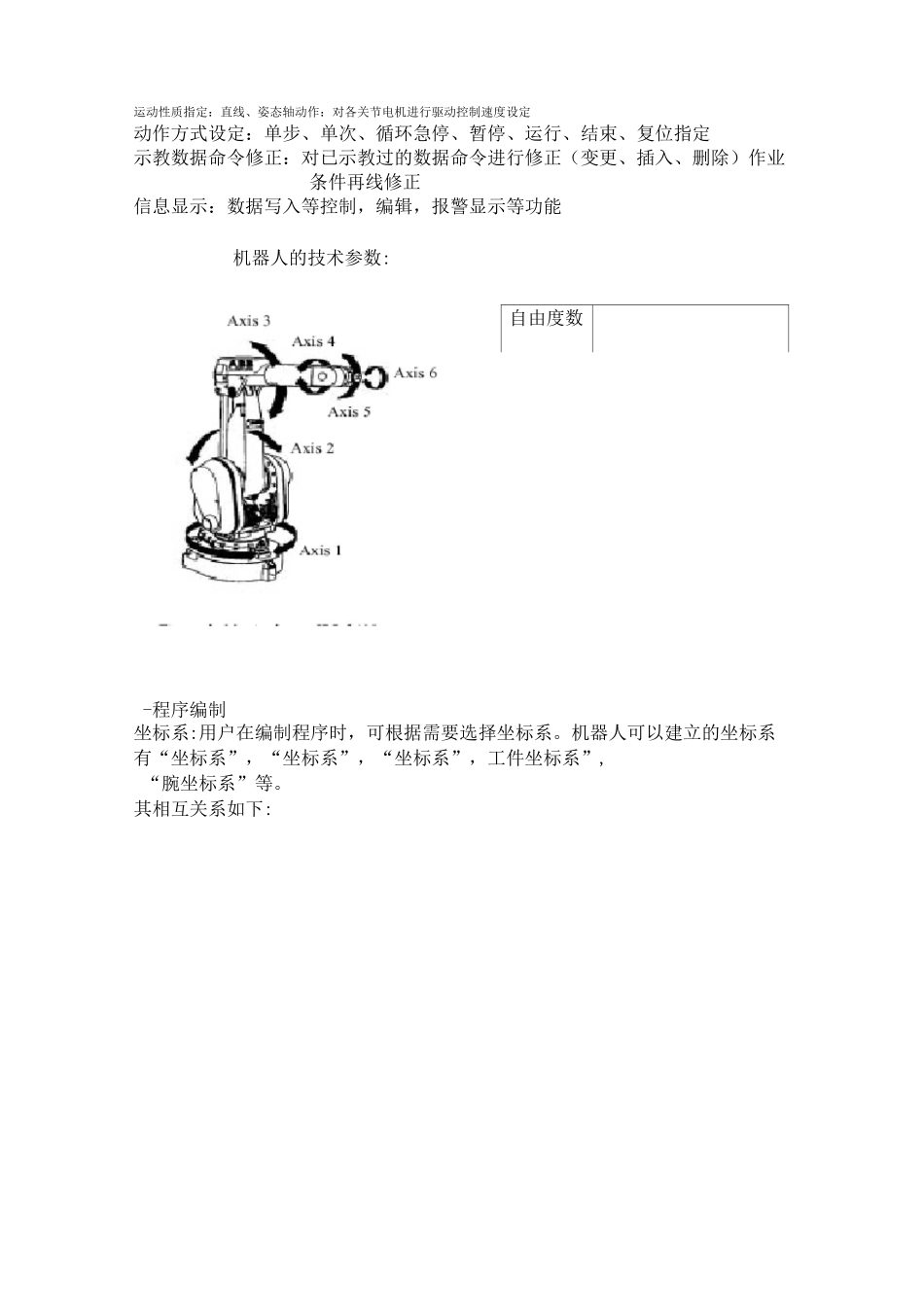
机械本体:•由六个转轴组成的空间六杆开链结构;•六个转轴均有伺服电机驱动,每个电机后面均有编码器;•每个转轴带有一个齿轮箱
•有手动松闸按钮,用于维修时使用
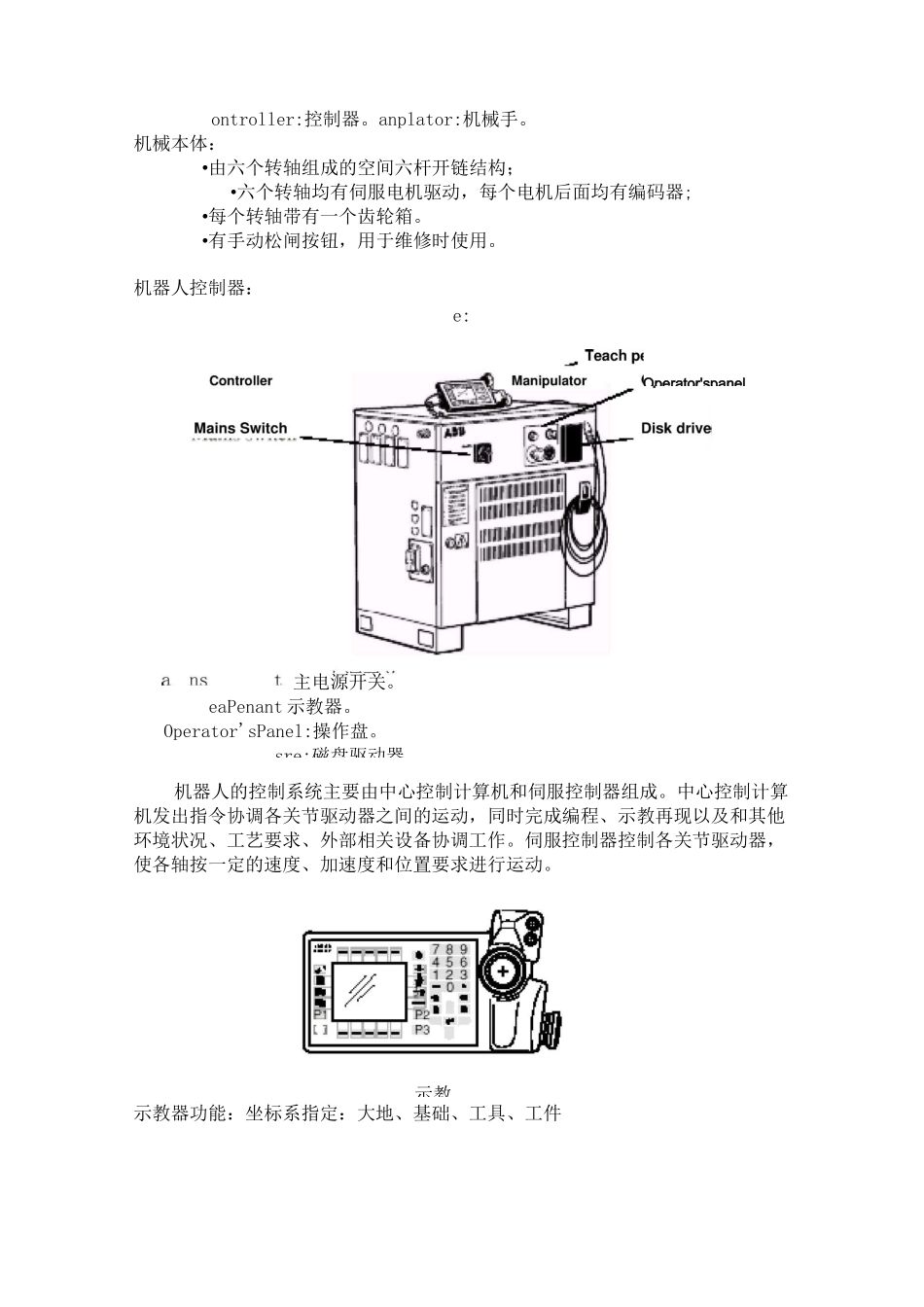
机器人控制器:e:机器人的控制系统主要由中心控制计算机和伺服控制器组成
中心控制计算机发出指令协调各关节驱动器之间的运动,同时完成编程、示教再现以及和其他环境状况、工艺要求、外部相关设备协调工作
伺服控制器控制各关节驱动器,使各轴按一定的速度、加速度和位置要求进行运动
示教器功能:坐标系指定:大地、基础、工具、工件Operator'spanel主电源开关
eaPenant示教器
Operator'sPanel:操作盘
sre:磁盘驱动器示教自由度数运动性质指定:直线、姿态轴动作:对各关节电机进行驱动控制速度设定动作方式设定:单