第二节转向架的蛇行运动转向架的结构型式甚多,但从研究蛇行运动稳定性的角度出发,可分为轮对刚性定位的转向架(以下简称刚性转向架)和轮对弹性定位的转向架(以下简称弹性转向架)两大类
下面将分别讨论它们的蛇行运动
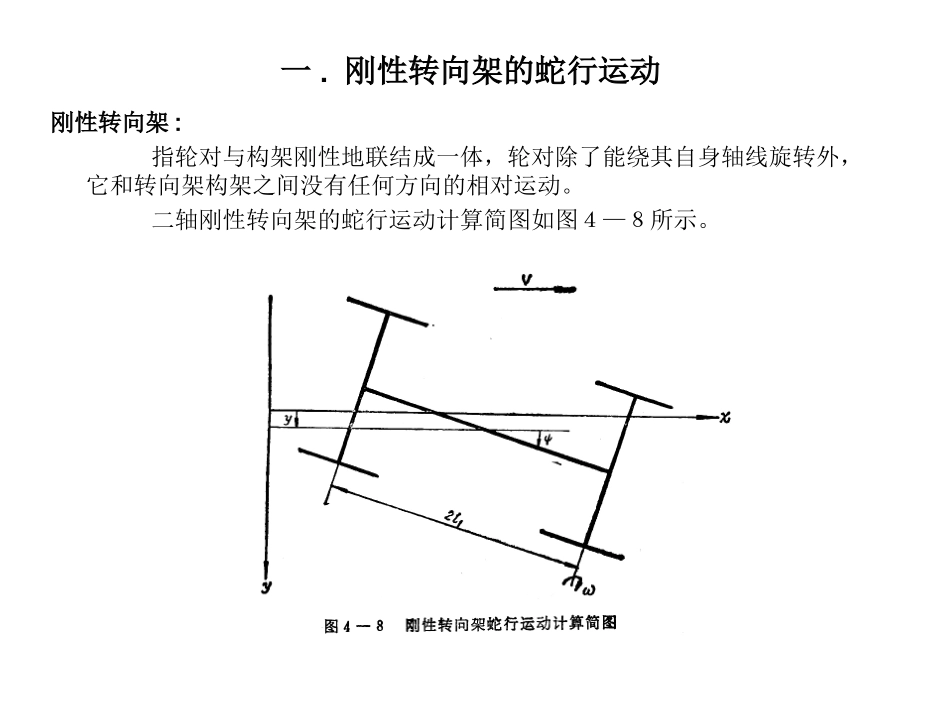
刚性转向架的蛇行运动刚性转向架:指轮对与构架刚性地联结成一体,轮对除了能绕其自身轴线旋转外,它和转向架构架之间没有任何方向的相对运动
二轴刚性转向架的蛇行运动计算简图如图4—8所示
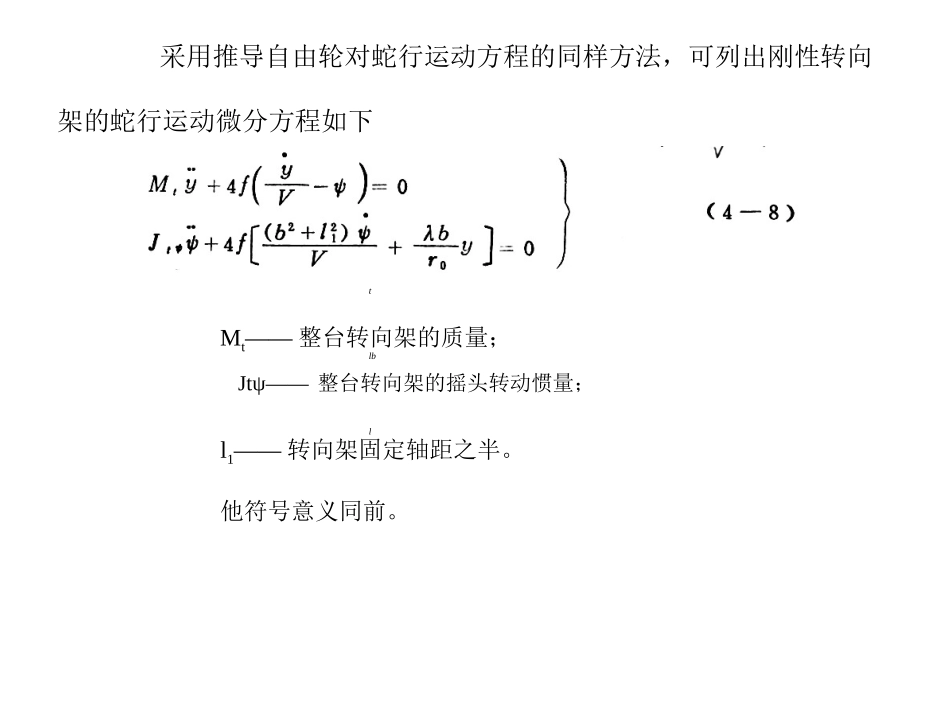
采用推导自由轮对蛇行运动方程的同样方法,可列出刚性转向架的蛇行运动微分方程如下tlblMt——整台转向架的质量;Jtψ——整台转向架的摇头转动惯量;l1——转向架固定轴距之半
他符号意义同前
在低速时可略去惯性力(力矩)一项,则得:(4—8a)解微分方程组(4—8a)得:(4—9)因此,在低速时略去惯性力(力矩)的情况下,刚性转向架的蛇行运动也是一种简谐运动,它的圆频率为(4—10)刚性转向架的蛇行运动波长为:二、具有弹性定位转向架的蛇行运动一、基本假定为了建立转向架的运动微分方程式,在前节研究自由轮对蛇行运动时所作的两个假定的基础上,还须补充如下的假定:1假定车体与转向架为弱耦合,因此车体的滚摆及摇头振动对转向架几乎不产生影响,所以,可以认为车体是处于相对稳定的固定状态,只传递垂直载荷给转向架;2假定转向架构架的重心高度与车轴中心线一致,所以构架侧滚振动的影响可以忽略;3一系和二系悬挂(包括轮对定位)的刚度都是线性的
此外,在心盘承载的结构中,不考虑转向架相对车体转动时所产生的摩擦力矩
二、运动微分方程通过以上一系列的假定,在研究车辆的蛇行运动时,可将其简化为一最简单的转向架在理想的平直道上作等速运动的系统
因此,转向架在水平平面内有六个自由度,即:每个轮对的横摆与摇头,转向架构架的横摆与摇头
图4—9所示的具有弹性定位转向架蛇行运动的计算简图,根据图4—9所示的具有弹性定位转向架蛇行