第9章直流电动机的电力拖动电机及拖动基础9
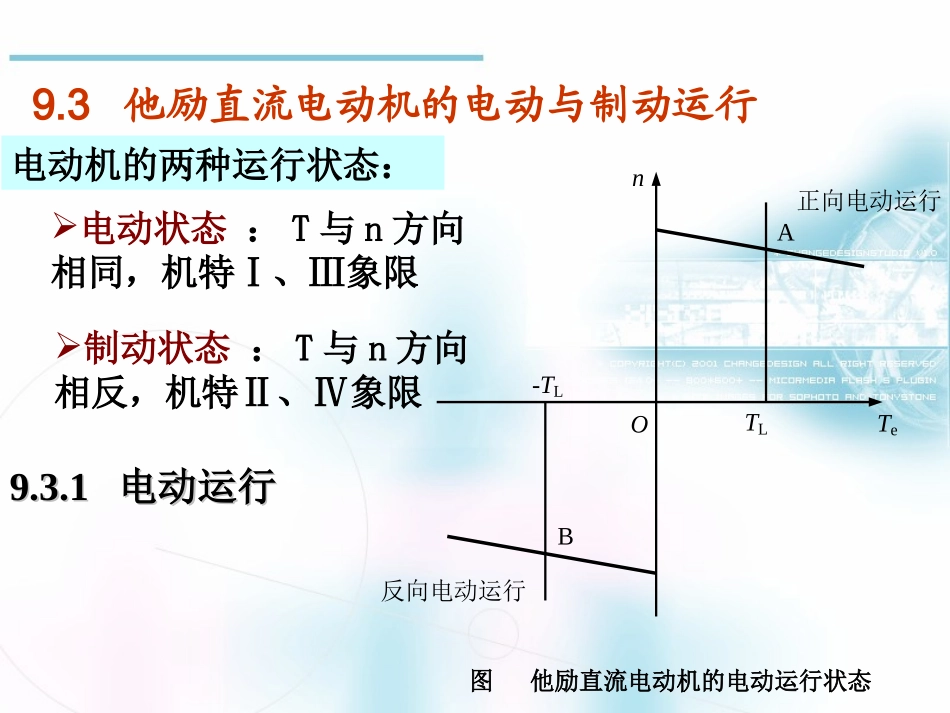
3他励直流电动机的电动与制动运行教学目的掌握直流电动机能耗制动、反接制动、回馈制动的基本原理及制动电阻的计算方法电动机的两种运行状态:电动状态:T与n方向相同,机特Ⅰ、Ⅲ象限制动状态:T与n方向相反,机特Ⅱ、Ⅳ象限9
3他励直流电动机的电动与制动运行9
1电动运行电动运行OTenTLA正向电动运行-TLB反向电动运行图他励直流电动机的电动运行状态9
1电动运行电动运行要使电动机反转,必须改变电磁转矩T的方向
在自动控制中,通常直流电动机的反转实施方法有两种:1、改变励磁电流方向2、改变电枢电压极性实际应用中大多采用后者来实现电动机的反转
制动目的:快速停车(反向)或限速
制动:使电力拖动系统从某一稳定转速开始减速至转速为零,或者限制位能负载的下行下行速度,使其在某一稳定转速下运行
制动状态:T与n方向相反,机特Ⅱ、Ⅳ象限能耗制动反接制动回馈制动断开电源抱闸机械制动电气制动自由停车制动方法M+-IaEanTTL负载UNKMKMRcRfUf9
2能耗制动能耗制动在电动状态,电枢电流、电枢电动势、转速及驱动性质的电磁转矩如图所示
+-IaEanTTL负载UNKMKMRcRfUfM9
2能耗制动能耗制动0,0aaatNaEIRRTCI动转矩T-TL