3反射变换教学目标:一、知识与技能:通过实例理解反射变换的定义及其几何意义;掌握反射变换矩阵的两种表达式,并能初步运用
二、方法与过程借助例题的探险究,发现反射变换的两种矩阵形式,寻求两种不同形式的内在联系
三、情感、态度与价值观在探究活动中,培养学生的合作交流意识,体验成功的喜悦,增强自信心;感受数学的符号美,领会数学公式的美学意义
教学重点:推导反射变换矩阵的两种表达式教学难点:两种矩阵表达式生成思路及它们之间的内在联系教学过程一、新课引入如图,设平面上建立了直角坐标系
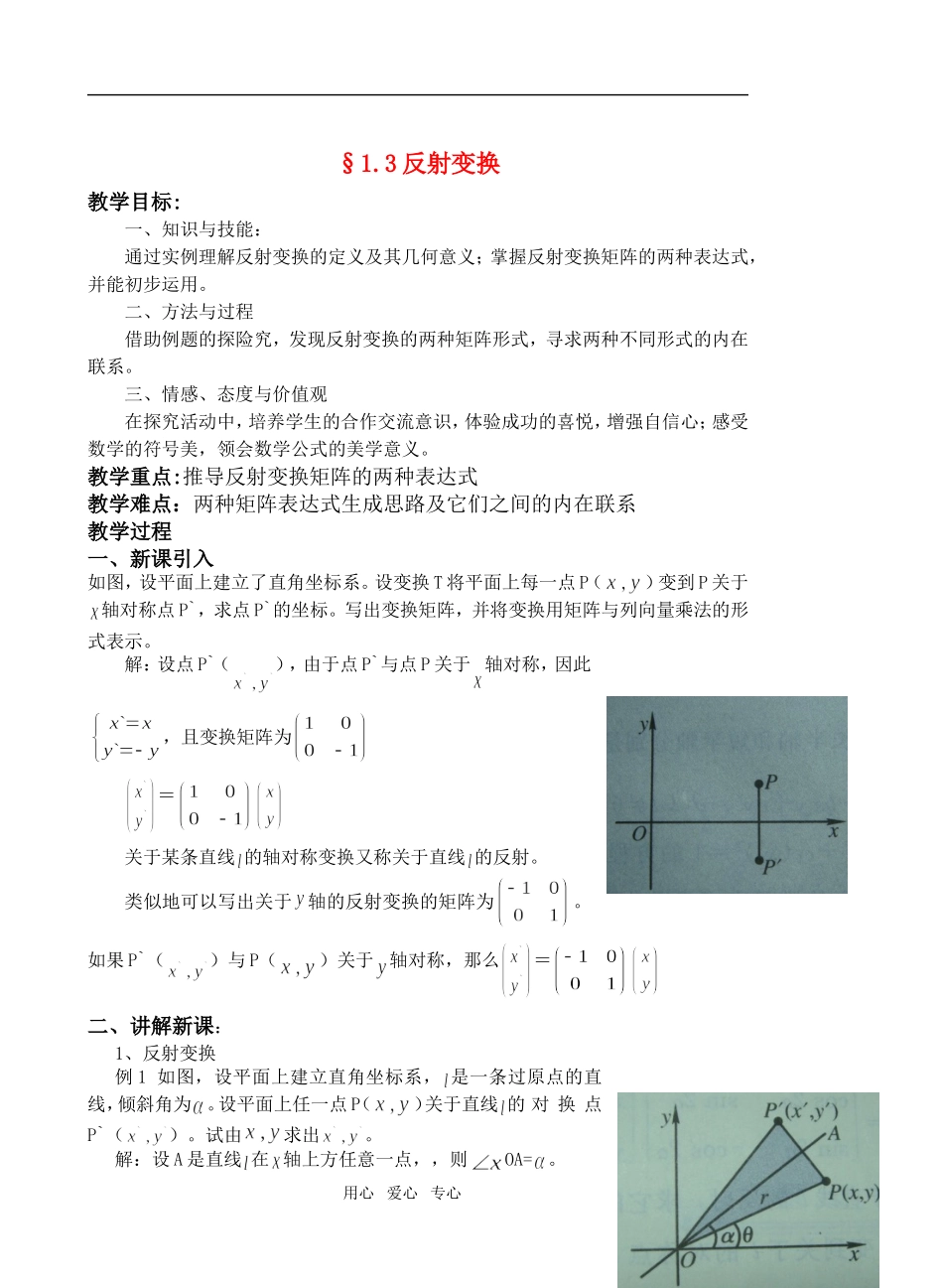
设变换T将平面上每一点P()变到P关于轴对称点P`,求点P`的坐标
写出变换矩阵,并将变换用矩阵与列向量乘法的形式表示
解:设点P`(),由于点P`与点P关于轴对称,因此,且变换矩阵为=关于某条直线的轴对称变换又称关于直线的反射
类似地可以写出关于轴的反射变换的矩阵为
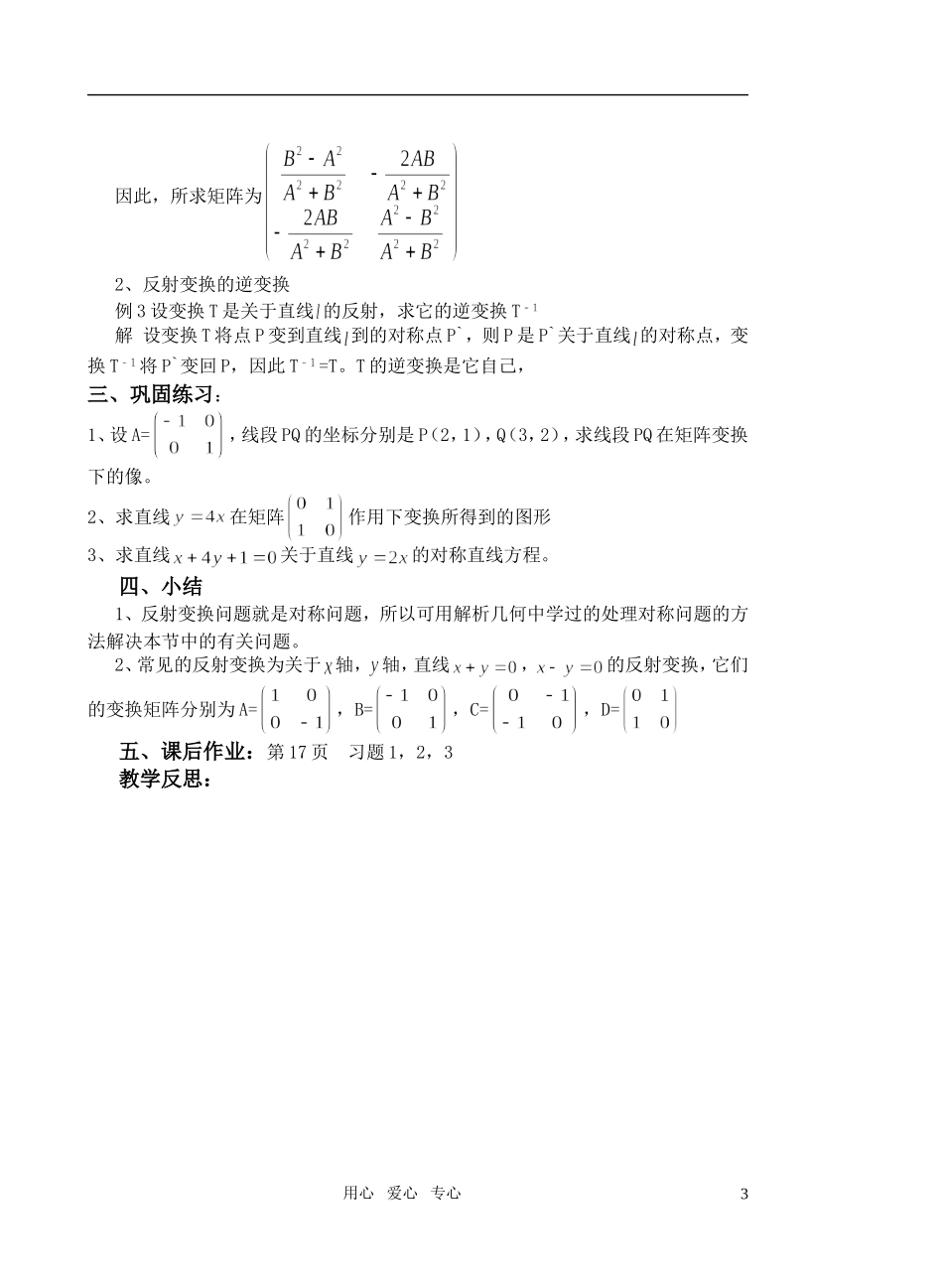
如果P`()与P()关于轴对称,那么=二、讲解新课:1、反射变换例1如图,设平面上建立直角坐标系,是一条过原点的直线,倾斜角为
设平面上任一点P()关于直线的对换点P`()
解:设A是直线在轴上方任意一点,,则OA=
用心爱心专心1仍设=|OP|,=OP,与旋转的情形类似地有|OP`|=|OP|=
由于点P,P`关于OA对称,OA平分POP`,则有POA=AOP`,即OA-OP=OP`-OA从而OP`=2OA-OP=2于是与都是的一次多项式,常数项为0,一次项系数分别是,和,组成矩阵这个矩阵代表了将每个点P变到其对称点P`的轴对称变换,变换前后的点P,P`的坐标,之间的关系式可用矩阵乘法的形式表示为=例2求关于直线的反射变换解:如图建立平面直角坐标系,设点P()关于直线的对换点P`()
D(,)是线段PP`与该直线的交点向量与法向量(A,B)平行,存在某个实数,使(A,B)
因此(,)=D(,)在直线上,将D的坐标代入直线