11、、微机数字控制系统的主要特点是微机数字控制系统的主要特点是离散化离散化和和数字数字化化::离散化:离散化:在一定周期的采样时刻对模拟的在一定周期的采样时刻对模拟的连续信号进行实时采样,形成一连串的脉连续信号进行实时采样,形成一连串的脉冲信号,即离散的模拟信号,这就是离散冲信号,即离散的模拟信号,这就是离散化化数字化:数字化:用一组数码(如二进制码)来逼用一组数码(如二进制码)来逼近离散模拟信号的幅值,将它转换成数字近离散模拟信号的幅值,将它转换成数字信号,这就是数字化
信号,这就是数字化
22、定义:存储系数、分辨率、测、定义:存储系数、分辨率、测速误差率
答:答:存储系数存储系数:它表示数字量化的精度用:它表示数字量化的精度用K=K=计算机内部存储值计算机内部存储值//物理量的实际值表示,物理量的实际值表示,相当于模拟控制系统中的反馈系数
相当于模拟控制系统中的反馈系数
分辨率:分辨率:是用来衡量一种测速方法对被测是用来衡量一种测速方法对被测转速变化的分辨能力,在数字测速方法中,用转速变化的分辨能力,在数字测速方法中,用改变一个计数字所对应的转速变化量来表示
改变一个计数字所对应的转速变化量来表示
测速误差率:测速误差率:转速实际值和测量值之差转速实际值和测量值之差nn与实际值与实际值nn之比定义为测速误差率
之比定义为测速误差率
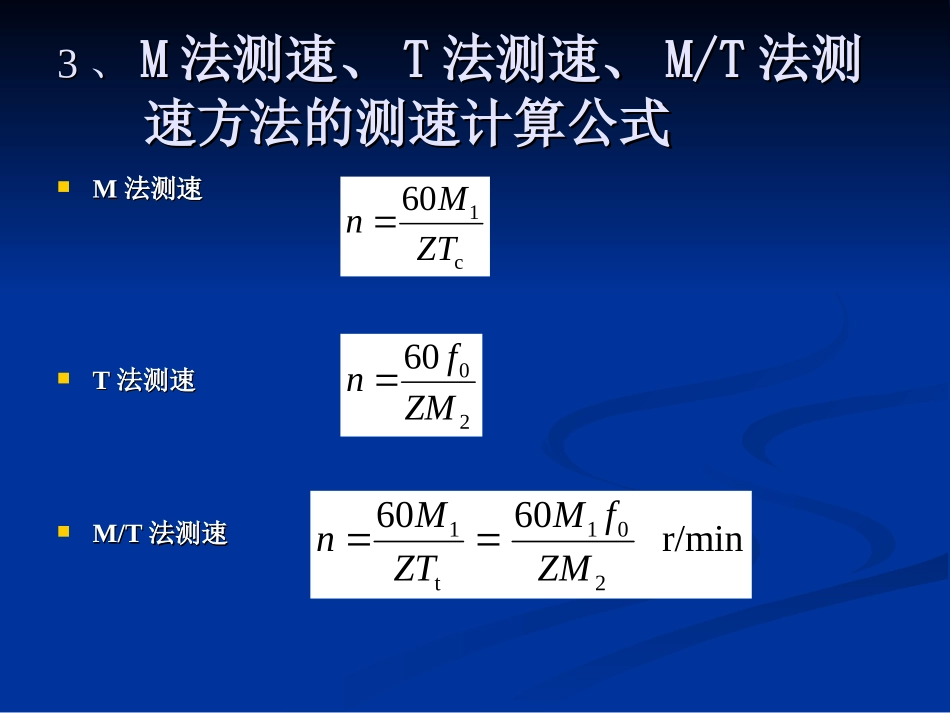
33、、MM法测速、法测速、TT法测速、法测速、M/TM/T法测法测速方法的测速计算公式速方法的测速计算公式MM法测速法测速TT法测速法测速M/TM/T法测速法测速c160ZTMn2060ZMfnr/min6060201t1ZMfMZTMn44、数字滤波方法
、数字滤波方法
答:答:算术平均值滤波、算术平均值滤波、中值滤波、中值滤波、中值平均滤波
中值平均滤波
55、数字、数字PIDPID的两种算法及差分