算法———艺术二分图匹配剖析很多人说,算法是一种艺术
但是对于初学者的我,对算法认识不是很深刻,但偶尔也能感受到他强大的魅力与活力
这让我追求算法的脚步不能停止
下面我通过分析匈牙利算法以及常用建图方式,与大家一起欣赏算法的美
匈牙利算法匈牙利算法是用来解决最大二分图匹配问题的,所谓二分图即“一组点集可以分为两部分,且每部分内各点互不相连,两部分的点之间可以有边”
所谓最大二分图匹配即”对于二分图的所有边,寻找一个子集,这个子集满足两个条件,1:任意两条边都不依赖于同一个点
2:让这个子集里的边在满足条件一的情况下尽量多
首先可以想到的是,我们可以通过搜索,找出所有的这样的满足上面条件的边集,然后从所有的边集中选出边数最多的那个集合,但是我们可以感觉到这个算法的时间复杂度是边数的指数级函数,因此我们有必要寻找更加高效的方法
目前比较有效的方法有匈牙利算法和通过添加汇点和源点的网络流算法,对于点的个数都在200到300之间的数据,我们是采取匈牙利算法的,因为匈牙利算法实现起来要比网络流简单些
下面具体说说匈牙利算法:介绍匈牙利之前,先说说“增广轨”
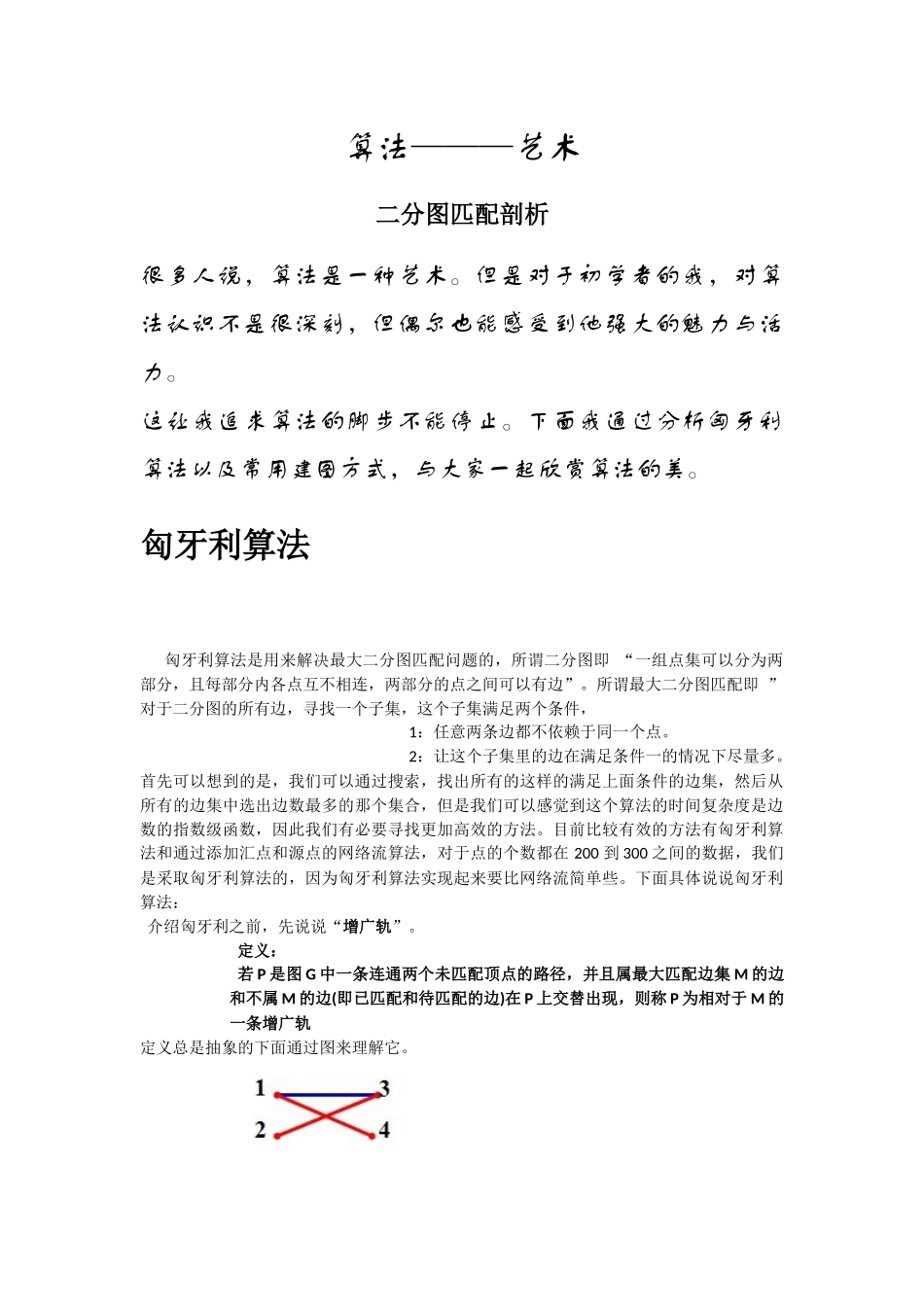
定义:若P是图G中一条连通两个未匹配顶点的路径,并且属最大匹配边集M的边和不属M的边(即已匹配和待匹配的边)在P上交替出现,则称P为相对于M的一条增广轨定义总是抽象的下面通过图来理解它
图中的线段(2->3,3->1,1->4)便是上面所说的p路径,我们假定边(1,3)是以匹配的边,(2,3)(1,4)是未匹配的边,则边(4,1)边(1,3)和边(3,2)在路径p上交替的出现啦,那么p就是相对于M的一条增广轨,这样我们就可以用边1,4和边2,3来替换边1,3那么以匹配的边集数量就可以加1,
匈牙利算法就是同过不断的寻找增广轨实现的
很明显如果二分图的两部分点分别为n和m,那么最大匹配的数目应该小于等于MIN(n,m);因此我们可以