第三届全国光电设计大赛理论方案报告编号:参赛题目:基于光电导航的无人驾驶智能车参赛队伍名称:所在学校:队长姓名:提交方案时间:一.研究内容设计一辆具有光电导航能力的智能车,要求在指定的赛道上,从起点出发经过现场随机确定的至少五个十字路口或丁字路口,进入指定的停车位,结束后,发出声光提示
要实现上述目的,就得研究如何使小车实现自动导航控制
电源管理模块,控制核心模块,方向识别模块,电机驱动模块,舵机控制模块以及传感器的排布方案
二.研究方案根据所要实现的系统功能,我们制定了如下的设计方案:在小车上安装2~3个小摄像头,通过摄像头拍摄小车行进过程中的车道信息和相关指示标志符号,通过实时图像采集和信号处理识别道路特征和标识特征,并将各种特征发送到总控制模块
总控制模块读取道路特征信息和从车体的速度测试模块得到的速度等状态信息进行综合判断,从而判断出小车当前所处的状态和应采取的控制方案,从而通过电机和舵机控制模块进行小车速度、角度等指标的控制
从而完成小车在直道、弯道、入库等过程的控制
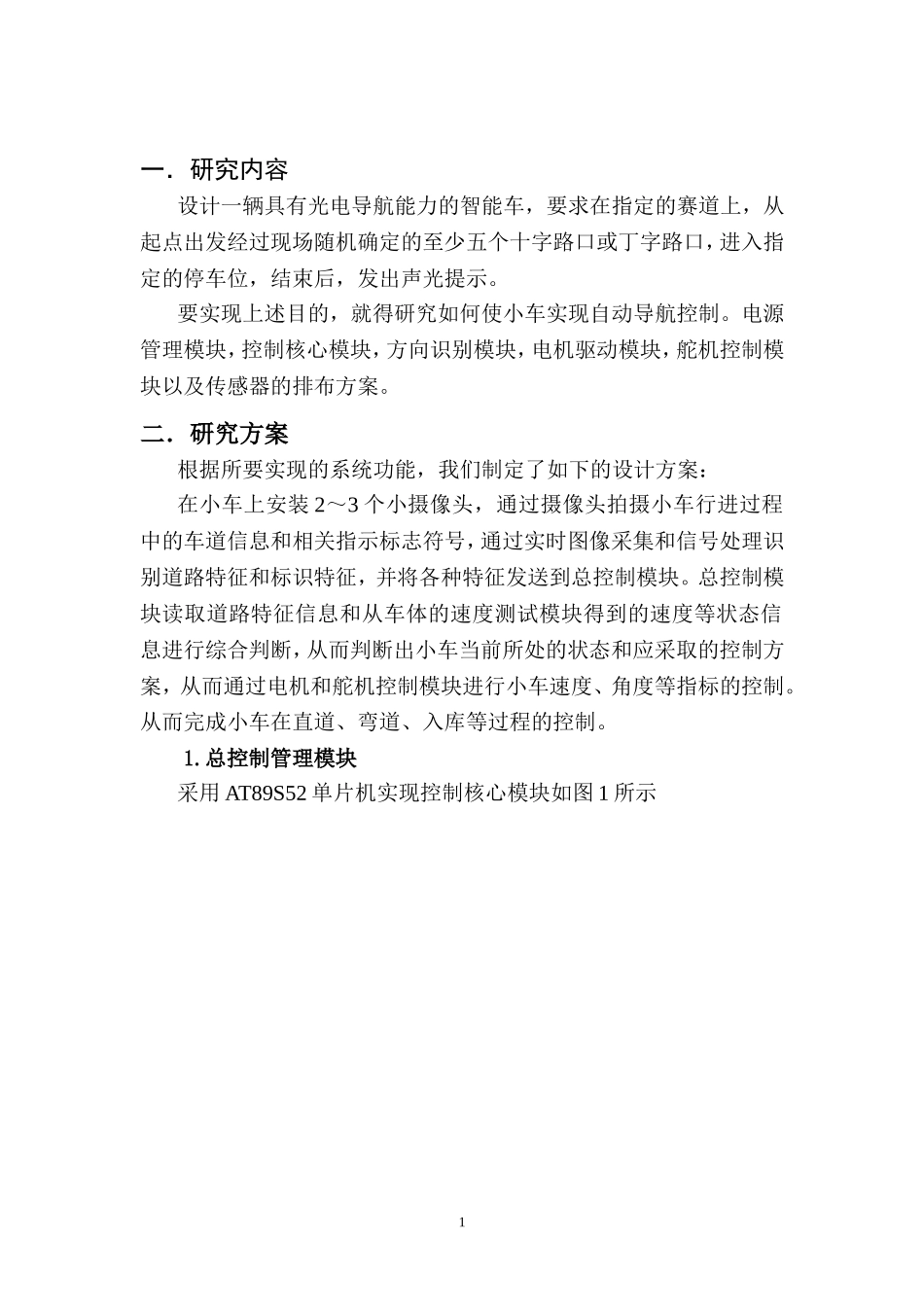
总控制管理模块采用AT89S52单片机实现控制核心模块如图1所示1图1系统框架图本系统的控制核心是单片机AT89S52
它能实时地获得通过FPGA采集并处理得到的相关信息,经过识别和判断通过下达指令给舵机和直流电机实现小车的运动控制
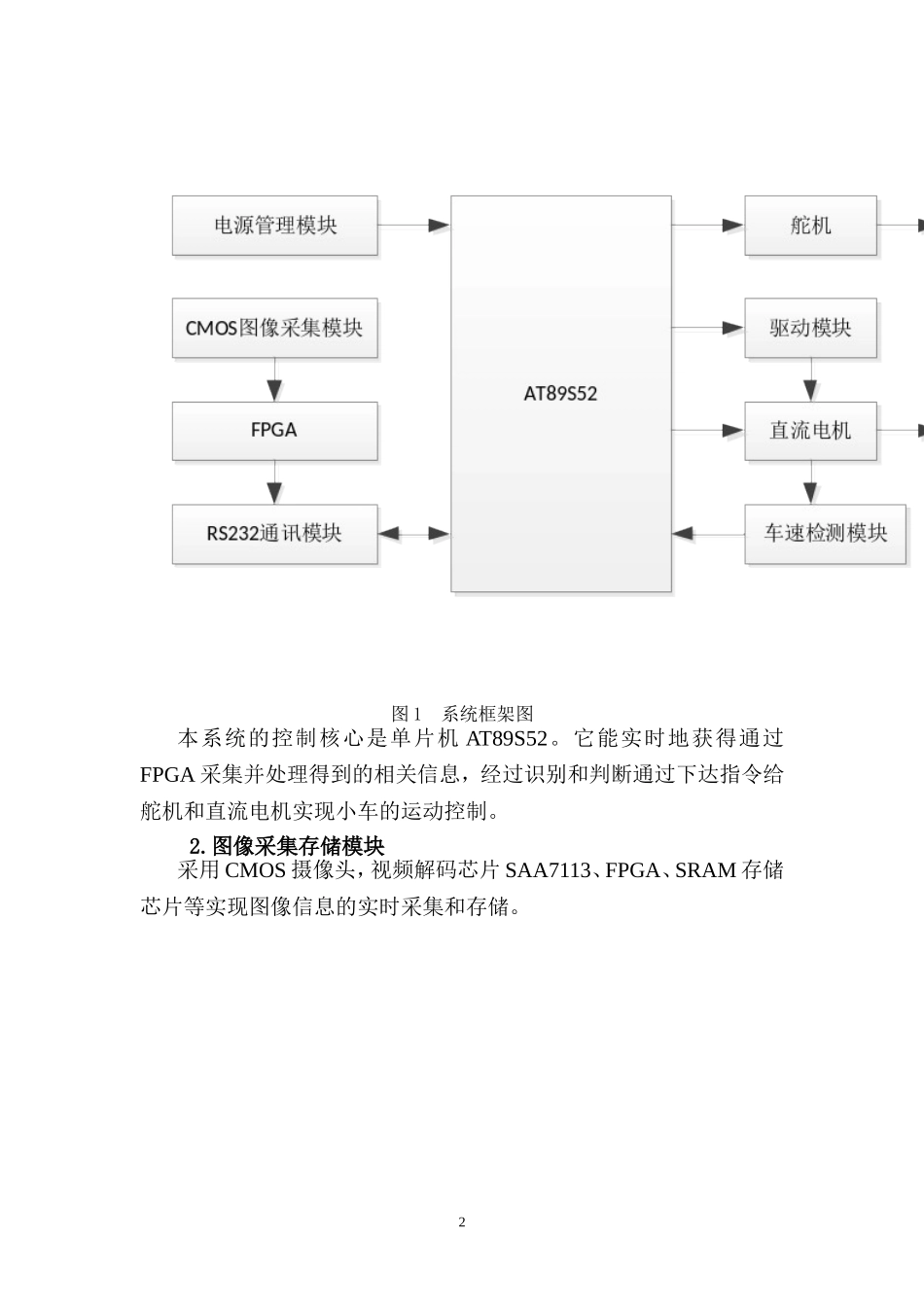
图像采集存储模块采用CMOS摄像头,视频解码芯片SAA7113、FPGA、SRAM存储芯片等实现图像信息的实时采集和存储
2图2视频图像采集框图FPGA将采集到的图像数据保存到缓存中,为后端对图像的进一步处理提供数据
本系统采用两块SRAM作为图像缓存,并应用PING--PANG缓存控制方法对其进行操作
图像信息处理及特征识别模块在FPGA中通过Verilog编写程序实现对存储在SRAM中的图像进行实时处理和特征识别
特征包括:小车直行时的方向和边线的角度;