实用标准文案文档matlab实现PUMA机器人的工作空间PUMA机器人的工作空间主要有前3个关节决定,后3个关节决定姿态
程序编写好了,请看运行结果
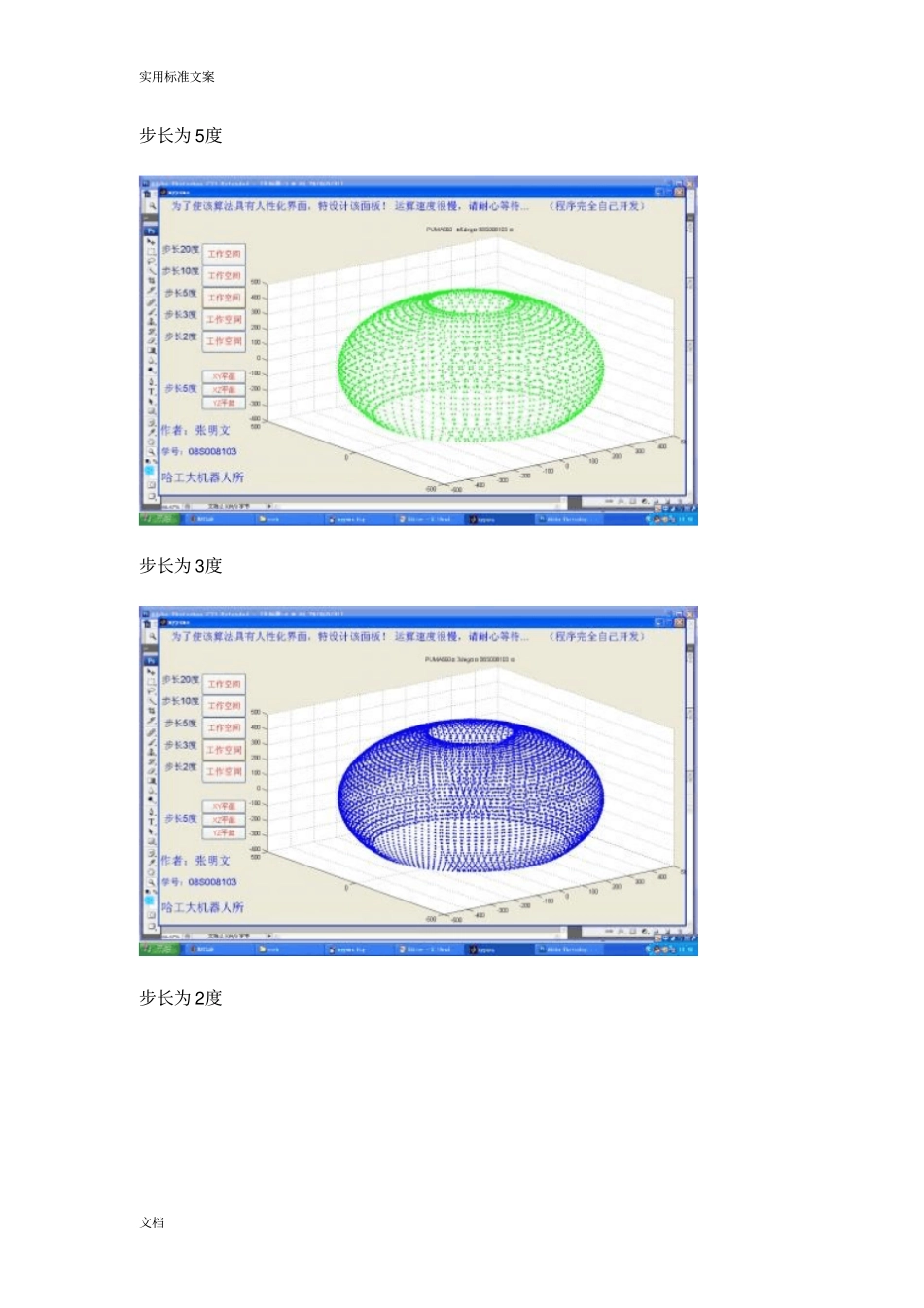
步长为20度步长为10度实用标准文案文档步长为5度步长为3度步长为2度实用标准文案文档步长为5度时的XY平面步长为5度时的XZ,YZ平面实用标准文案文档编写时的界面,为运行源代码如下:functionvarargout=mypuma(varargin)gui_Singleton=1;gui_State=struct('gui_Name',mfilename,
'gui_Singleton',gui_Singleton,
实用标准文案文档'gui_OpeningFcn',@mypuma_OpeningFcn,
'gui_OutputFcn',@mypuma_OutputFcn,
'gui_LayoutFcn',[],
'gui_Callback',[]);ifnargin&&ischar(varargin{1})gui_State
gui_Callback=str2func(varargin{1});endifnargout[varargout{1:nargout}]=gui_mainfcn(gui_State,varargin{:});elsegui_mainfcn(gui_State,varargin{:});endhandles
output=hObject;guidata(hObject,handles);functionvarargout=mypuma_OutputFcn(hObject,eventdata,handles)varargout{1}=handles
output;%步长为20度时的工作空间,2个for循环就搞定functionpushbutton1_Callback(hObject,