1JohannC
Rocholl(Rostock)StyleDelta机器人运动学bySteveGraves前言首先我要感谢JohannRocholl所做出的贡献,虽然我们未曾谋面,但本文所写出的大部分内容都要归功于他
例如,本文所有的Rostock图都是通过他的OpenSCAD模型的修改版本生成的,他的Marlin代码也是我验证此概念的依据
然后,我要感谢他创造了现在最好的DIY3D打印机
顺便说一句,我自己并没有delta3D打印机,我只有一台型号非常老的cartesian打印机
这个月,我已经在迫不及待地计划为KosselClear(delta3D打印机项目,由BlueEagleLabs出资)搭建Kickstarter众筹平台
引言这是我对Rostock打印机中应用delta机器人的形态的分析报告,已经出版的此类分析报告我还没有看到过,但有一个叫Clavel的人在研究原始delta机器人
我意识到对Rostock进行协调转化的固件已经唾手可得,并且我在网上查找的时间如果够久,我也能够找到此种转化的一些描述,可是,我喜欢独自理解事物
我的哲学是,如果一个问题是我能够自己解决的,那么在读现成答案之前我会自己寻找答案
这种方式让我有更多启发,使我不会受已经被接受的观念所影响而产生偏见,我可以得出看待问题的不同方法而不是现有解
例如,我使用外心研究正向运动学的方法可能很独特,因为那是我自己想出来的
一旦你解析了它,这就是一个相当简单的几何问题
那么,描述几何并定义几何公式就显得很重要了,部分的几何描述也就是建立命名规则
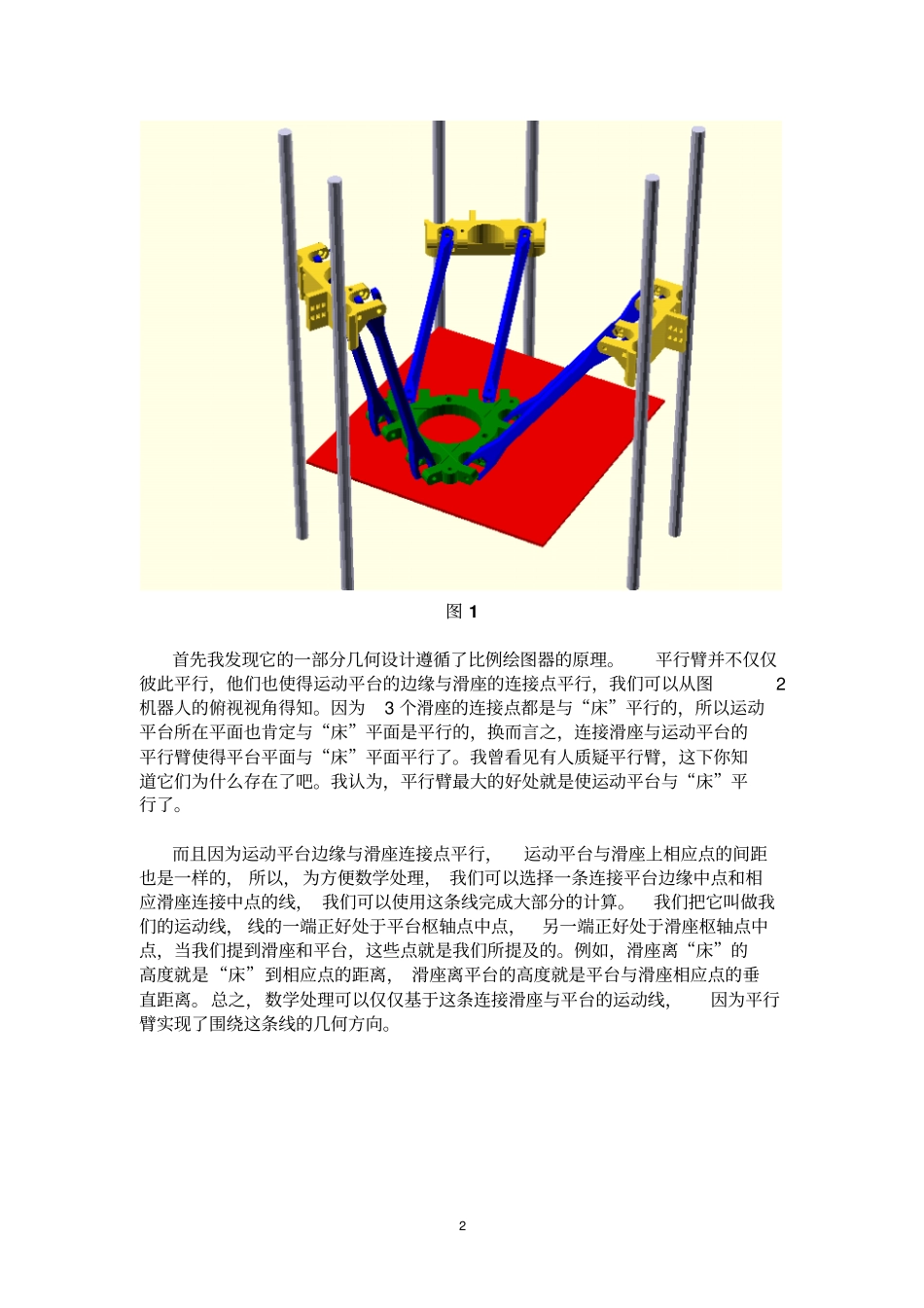
Delta机器人有三个导轨(Rostock打印机使用一对杆,如图1灰色部分),我们叫这些导轨A、B和C
每个列都有一个滑座(图1黄色部分)可以沿导轨上下移动,每个滑座有2个平行臂(图1蓝色部分)与运动平台(图1绿色部分)连接,每对臂长度相同,每个滑座与机器人底