调节阀的阀体部件与执行机构构成((((一))))阀体部件阀体部件是调节阀的调节部分,它直接与介质接触,由执行机构推动其发生位移而改变节流面积,达到调节的目的
根据使用对象的不同,有不同的阀体部件结构,主要形式有直通(单/双座)阀、套筒阀、隔膜阀、蝶阀、球阀等,其特点见表4一7所示
从力传递方式来看,执行机构主要分为直行程和角行程两种,分别如图4一32与图4一33所示
((((二))))执行机构执行机构是调节阀的推动装置,它根据信号大小产生相应的推力作为阀体动作的动力,根据其能源方式不同主要分为气动调节阀和电动调节阀
自力式压力调节阀:http://www
hzlgyb
com/1111
气动调节间气动调节阀主要是通过一个气动薄膜将气源的动力转换成阀的推力,根据推力作用方向又分为正作用与反作用两种形式,其结构如图4一32所示
本图由:自力式温度调节阀:http://www
hzlgyb
com/提供2
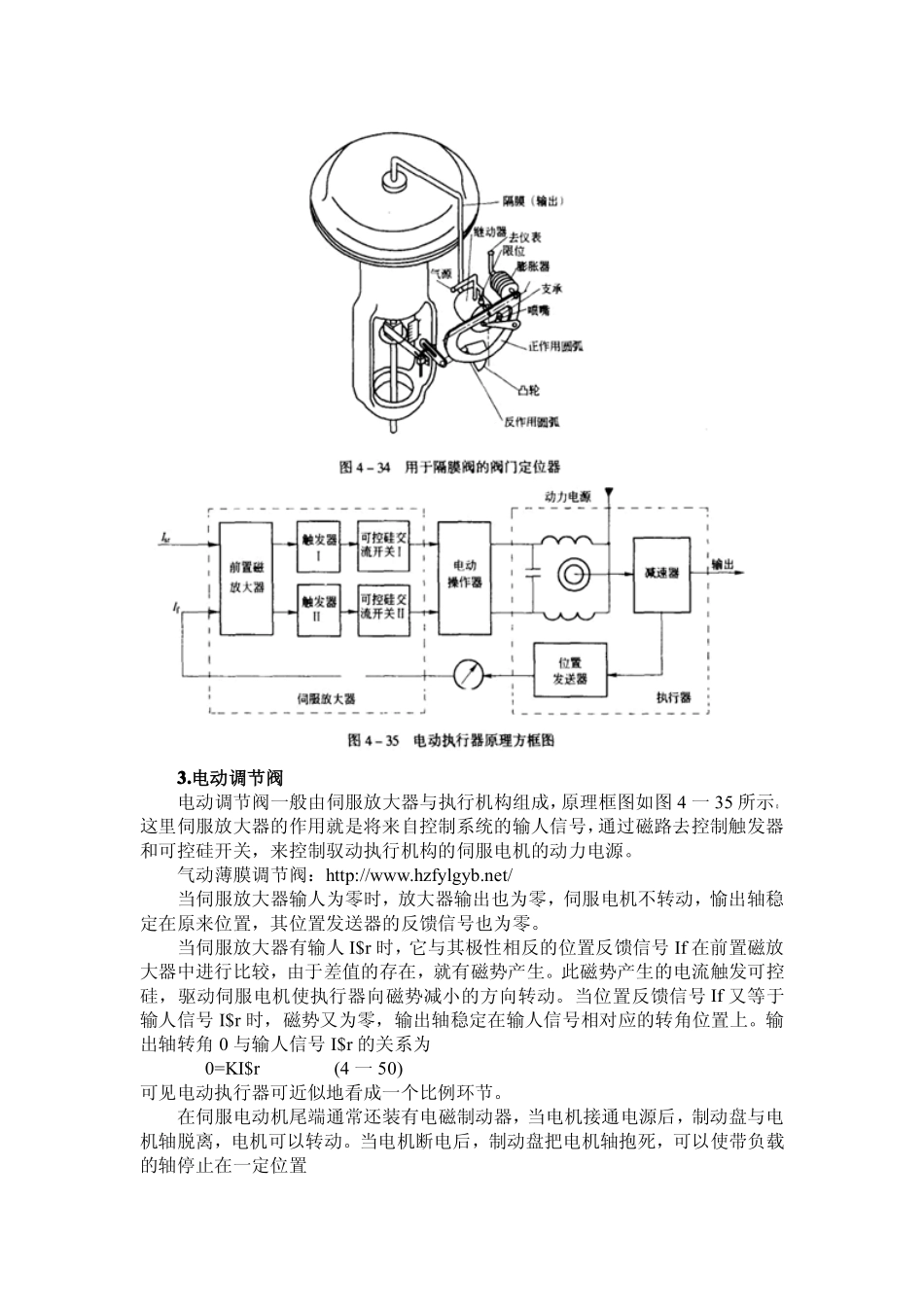
阀门定位器阀门定位器又称电一气阀门定位器,它将电信号转换为气信号而使调节阀产生相应的动作,同时将调节阀的阀位状况反馈通过电信号反馈给上位系统,其结构如图4一34所示
电动调节阀电动调节阀一般由伺服放大器与执行机构组成,原理框图如图4一35所示
这里伺服放大器的作用就是将来自控制系统的输人信号,通过磁路去控制触发器和可控硅开关,来控制驭动执行机构的伺服电机的动力电源
气动薄膜调节阀:http://www
hzfylgyb
net/当伺服放大器输人为零时,放大器输出也为零,伺服电机不转动,愉出轴稳定在原来位置,其位置发送器的反馈信号也为零
当伺服放大器有输人I$r时,它与其极性相反的位置反馈信号If在前置磁放大器中进行比较,由于差值的存在,就有磁势产生
此磁势产生的电流触发可控硅,驱动伺服电机使执行器向磁势减小的方向转动
当位置反馈信号If又等于输