起重机伸缩臂绳排伸缩机构伸缩原理主臂的伸缩机构很多,可以从两种角度进行分类,即按驱动形式的不同,以及各节臂间的伸缩次序关系不同进行分类
按驱动形式的不同,可分为液压、液压—机械和人力三种
采用液压驱动时,执行元件选用液压油缸,利用缸体和活塞杆的相对运动推动,推动下节臂的伸缩,在设计三节臂伸缩机构时,为了减轻重量,还可以利用吊臂之间的伸缩比例,采用钢丝绳和滑轮组实现第三节臂的伸缩,以实现第三节臂的伸缩,这就形成了液压机械驱动
在某些情况下可以取消伸缩机构,代之采用人力驱动,或采用推杆和绳索的器件,而辅之以人工安装插销等方法伸缩吊臂,这就形成了人力驱动
这几种方法往往在小于等于三节臂的情况下使用
对于拥有三节或三节以上的吊臂来讲,各节臂的伸缩方式可以由不同的选择,但是,由前面提到的大致可以分为三类
(1)顺序伸缩:指吊臂在伸缩过程中,各节伸缩臂必须按一定先后顺序,完成伸缩动作
(2)同步伸缩:指吊臂在伸缩过程中,各节伸缩臂同时以相同的形成比例进行伸缩
(3)独立伸缩:指吊臂在伸缩过程中,各节臂均能独立进行伸缩
显然,独立伸缩构,同样也可以完成顺序伸缩或同步伸缩的动作
在现实中,三节伸缩臂或三节以上的伸缩机构,往往式上述几种伸缩机构的中和,而很少单独采用某一种伸缩机构
在三节伸缩臂时,基本上采用一个液压缸加一个滑轮组的同步伸缩机构
超过三节臂时,常用两个液压缸加一个滑轮组的伸缩机构,或采用三个液压缸的伸缩机构,五节臂时为两个液压缸加两个滑轮组,或最后一节的伸缩可用手动的或简单的插销式伸缩机构
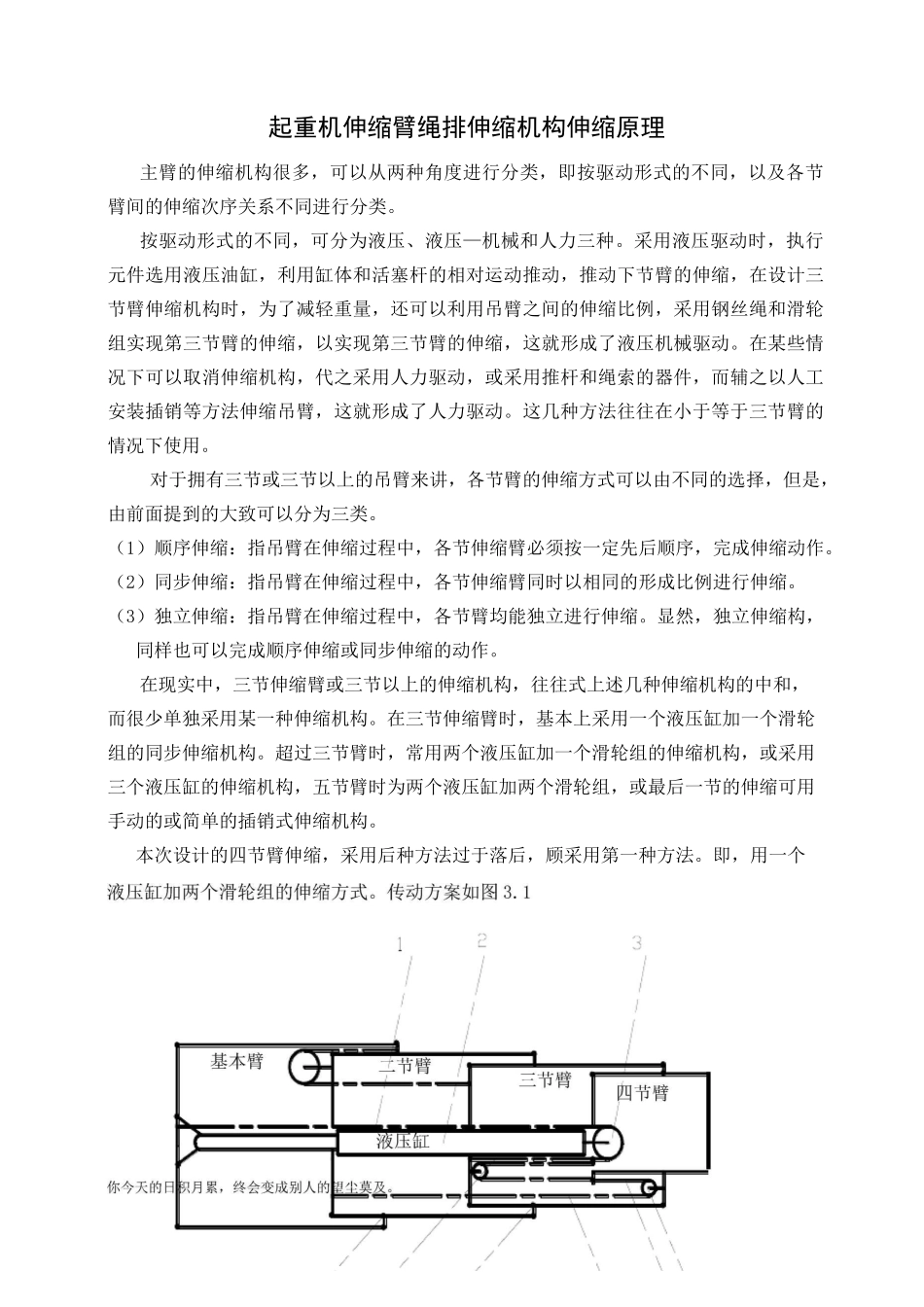
本次设计的四节臂伸缩,采用后种方法过于落后,顾采用第一种方法
即,用一个命运如同手中的掌纹,无论多曲折,终掌握在自己手中
你今天的日积月累,终会变成别人的望尘莫及
命运如同手中的掌纹,无论多曲折,终掌握在自己手中
你今天的日积月累,终会变成别人的望尘莫及
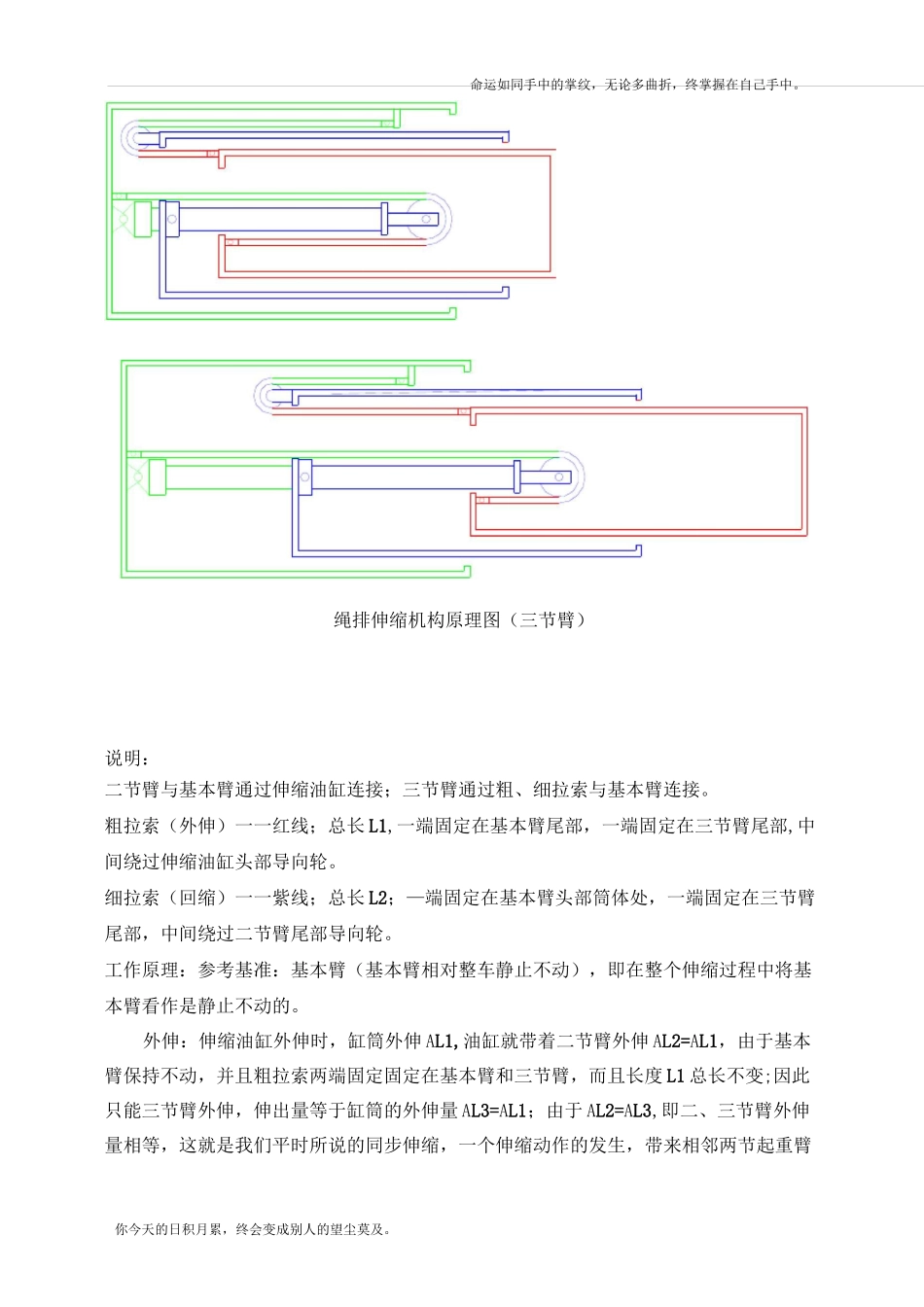
绳排伸缩机构原理图(三节臂)说明:二