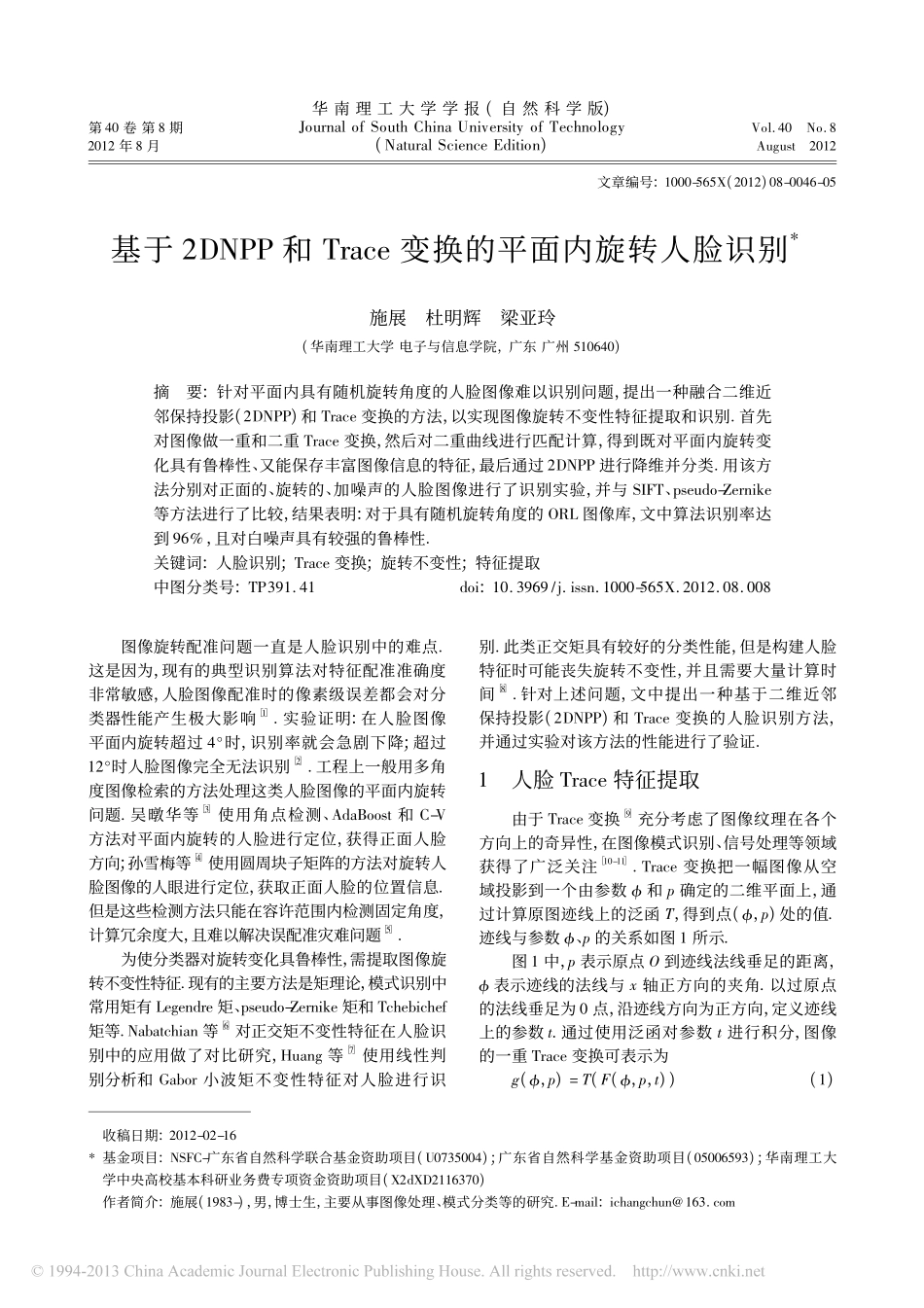
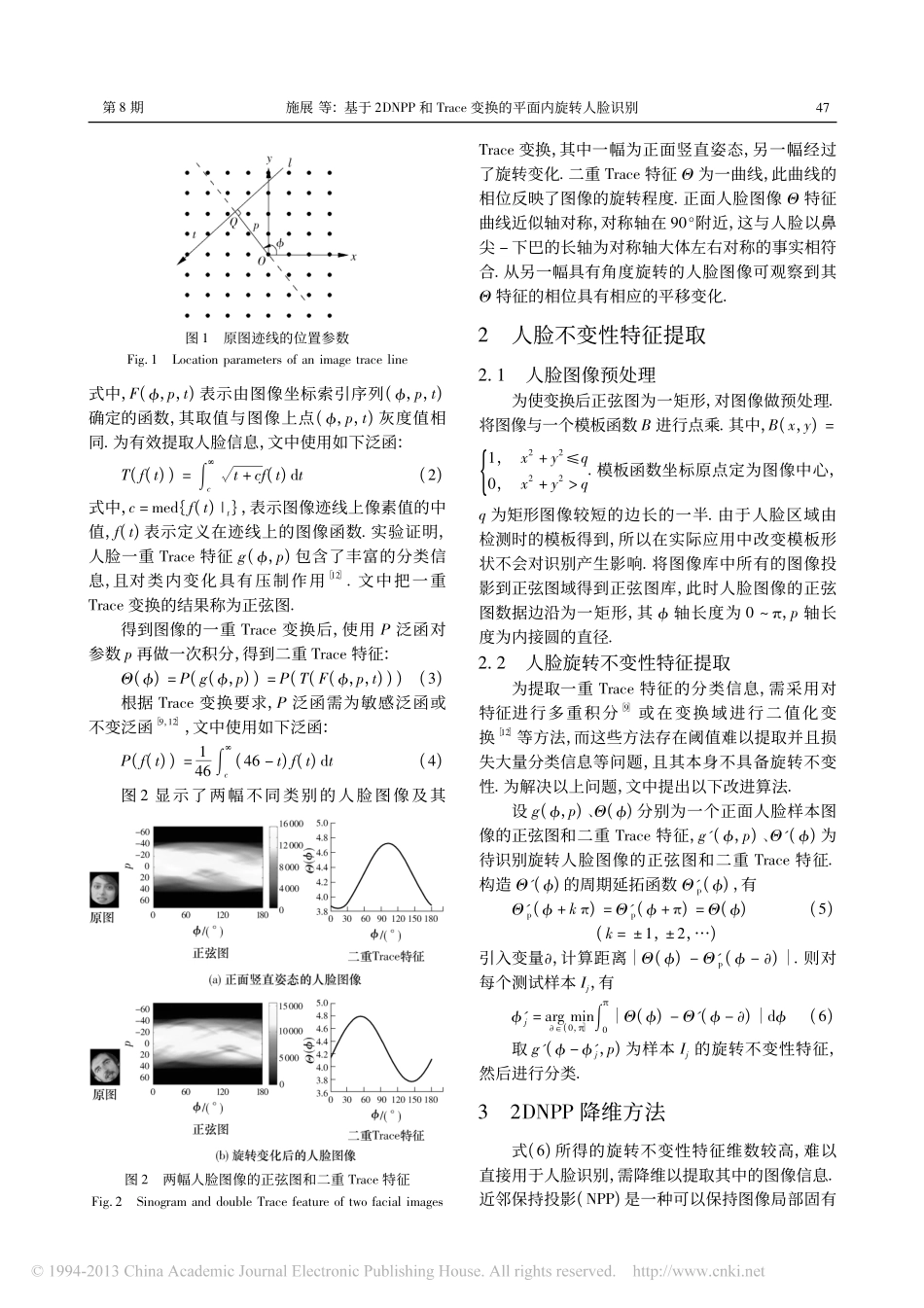
华南理工大学学报(自然科学版)第40卷第8期JournalofSouthChinaUniversityofTechnologyVol.40No.82012年8月(NaturalScienceEdition)August2012文章编号:1000-565X(2012)08-0046-05收稿日期:2012-02-16*基金项目:NSFC-广东省自然科学联合基金资助项目(U0735004);广东省自然科学基金资助项目(05006593);华南理工大学中央高校基本科研业务费专项资金资助项目(X2dXD2116370)作者简介:施展(1983-),男,博士生,主要从事图像处理、模式分类等的研究.E-mail:ichangchun@163.com基于2DNPP和Trace变换的平面内旋转人脸识别*施展杜明辉梁亚玲(华南理工大学电子与信息学院,广东广州510640)摘要:针对平面内具有随机旋转角度的人脸图像难以识别问题,提出一种融合二维近邻保持投影(2DNPP)和Trace变换的方法,以实现图像旋转不变性特征提取和识别.首先对图像做一重和二重Trace变换,然后对二重曲线进行匹配计算,得到既对平面内旋转变化具有鲁棒性、又能保存丰富图像信息的特征,最后通过2DNPP进行降维并分类.用该方法分别对正面的、旋转的、加噪声的人脸图像进行了识别实验,并与SIFT、pseudo-Zernike等方法进行了比较,结果表明:对于具有随机旋转角度的ORL图像库,文中算法识别率达到96%,且对白噪声具有较强的鲁棒性.关键词:人脸识别;Trace变换;旋转不变性;特征提取中图分类号:TP391.41doi:10.3969/j.issn.1000-565X.2012.08.008图像旋转配准问题一直是人脸识别中的难点.这是因为,现有的典型识别算法对特征配准准确度非常敏感,人脸图像配准时的像素级误差都会对分类器