热过载继电器的原理及应用当它接入主电路内,流过与电动机相同电流,当电动机过载达到一定程度时,热元件被加热达到一定弯曲程度,推动热继电器动作结构
热继电器的动作时间与过载电流的大小按反时限关系变化〔而作为电动机过载保护的热继电器,必须保证电动机的正常起动和运行不受影响,并能最大限度的发挥电动机的承载能力,因此热继电器的动作特性曲线应位于电动机的允许发热特性曲线的下方,且又接近于它)
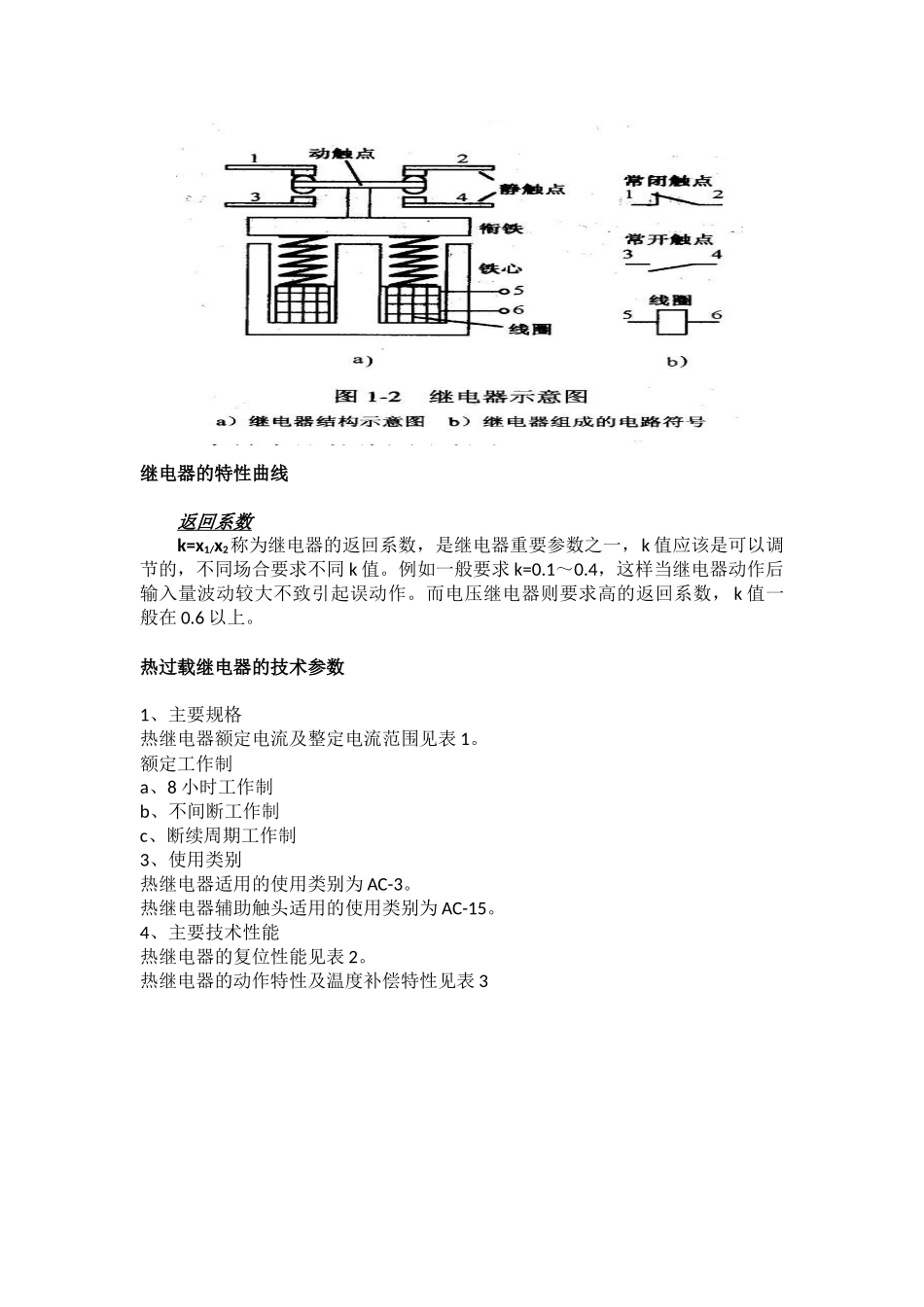
热过载继电器的构成它由发热元件、双金属片、触点及一套传动和调整机构组成
发热元件是一段阻值不大的电阻丝,串接在被保护电动机的主电路中
双金属片由两种不同热膨胀系数的金属片辗压而成
图中所示的双金属片,下层一片的热膨胀系数大,上层的小
当电动机过载时,通过发热元件的电流超过整定电流,双金属片受热向上弯曲脱离扣板,使常闭触点断开
由于常闭触点是接在电动机的控制电路中的,它的断开会使得与其相接的接触器线圈断电,从而接触器主触点断开,电动机的主电路断电,实现了过载保护
继电器的特性曲线返回系数k=x1/x2称为继电器的返回系数,是继电器重要参数之一,k值应该是可以调节的,不同场合要求不同k值
例如一般要求k=0
4,这样当继电器动作后输入量波动较大不致引起误动作
而电压继电器则要求高的返回系数,k值一般在0
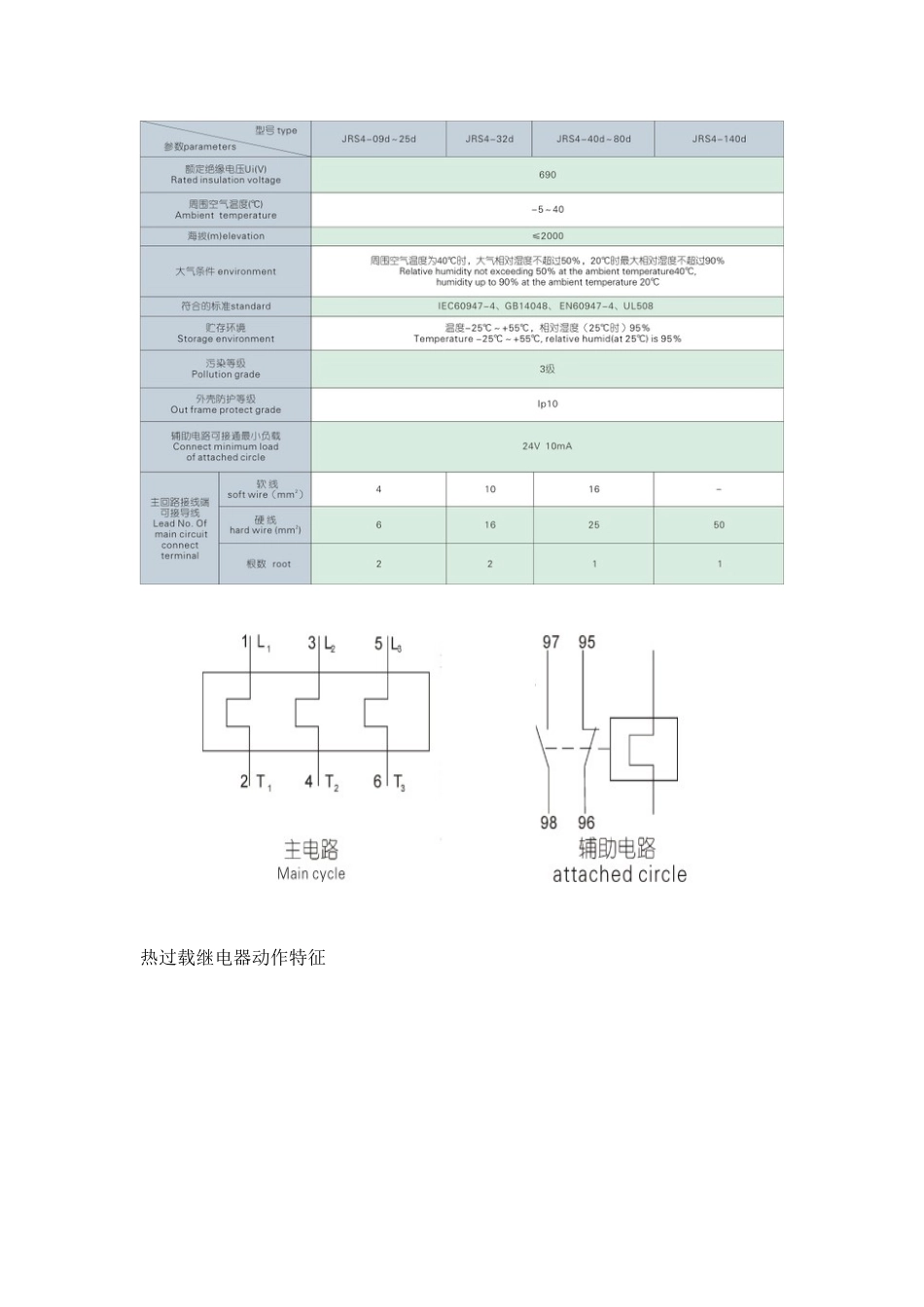
热过载继电器的技术参数1、主要规格热继电器额定电流及整定电流范围见表1
额定工作制a、8小时工作制b、不间断工作制c、断续周期工作制3、使用类别热继电器适用的使用类别为AC-3
热继电器辅助触头适用的使用类别为AC-15
4、主要技术性能热继电器的复位性能见表2
热继电器的动作特性及温度补偿特性见表3热过载继电器动作特征热过载继电器的特点热继电器的结构采用立体布置式(又称“二层楼式”)结构,全系列动作机构通用
热继电器为三相式,采用拉簧式跳跃动作机构,可以获得良好的瞬间跳跃动作特性