4-4坐标系与参数方程1.已知极坐标平面内的点P,则P关于极点的对称点的极坐标与直角坐标分别为()A
,(1,)B
,(1,-)C
,(-1,)D
,(-1,-)解析:点P关于极点的对称点为,即,且x=2cos=-2cos=-1,y=2sin=-2sin=-,所以选D
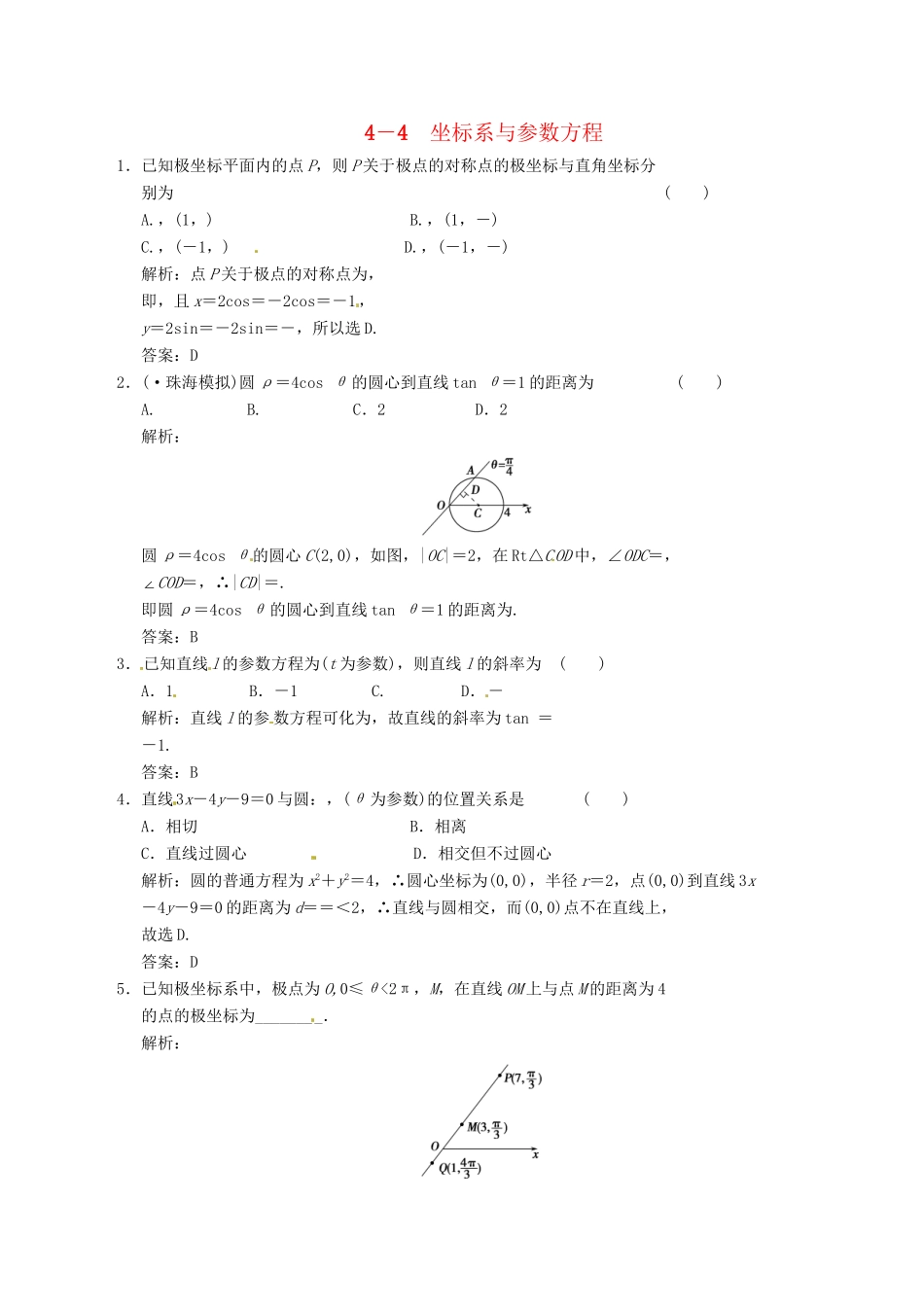
答案:D2.(·珠海模拟)圆ρ=4cosθ的圆心到直线tanθ=1的距离为()A
C.2D.2解析:圆ρ=4cosθ的圆心C(2,0),如图,|OC|=2,在Rt△COD中,∠ODC=,∠COD=,∴|CD|=
即圆ρ=4cosθ的圆心到直线tanθ=1的距离为
答案:B3.已知直线l的参数方程为(t为参数),则直线l的斜率为()A.1B.-1C
D.-解析:直线l的参数方程可化为,故直线的斜率为tan=-1
答案:B4.直线3x-4y-9=0与圆:,(θ为参数)的位置关系是()A.相切B.相离C.直线过圆心D.相交但不过圆心解析:圆的普通方程为x2+y2=4,∴圆心坐标为(0,0),半径r=2,点(0,0)到直线3x-4y-9=0的距离为d==<2,∴直线与圆相交,而(0,0)点不在直线上,故选D
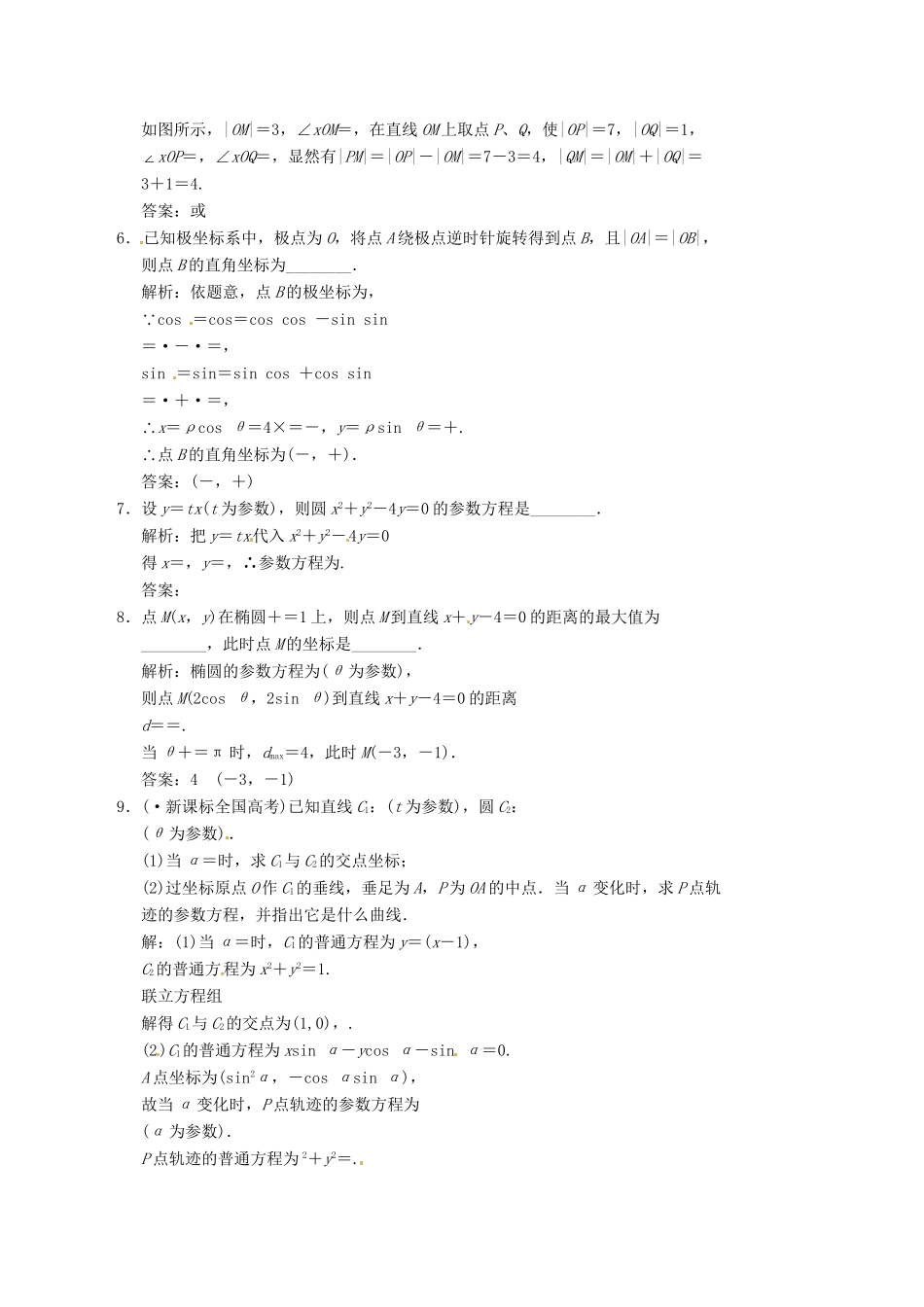
答案:D5.已知极坐标系中,极点为O,0≤θ