三.用解析法设计四杆机构建立解析关系式——求解所需的机构尺度参数1
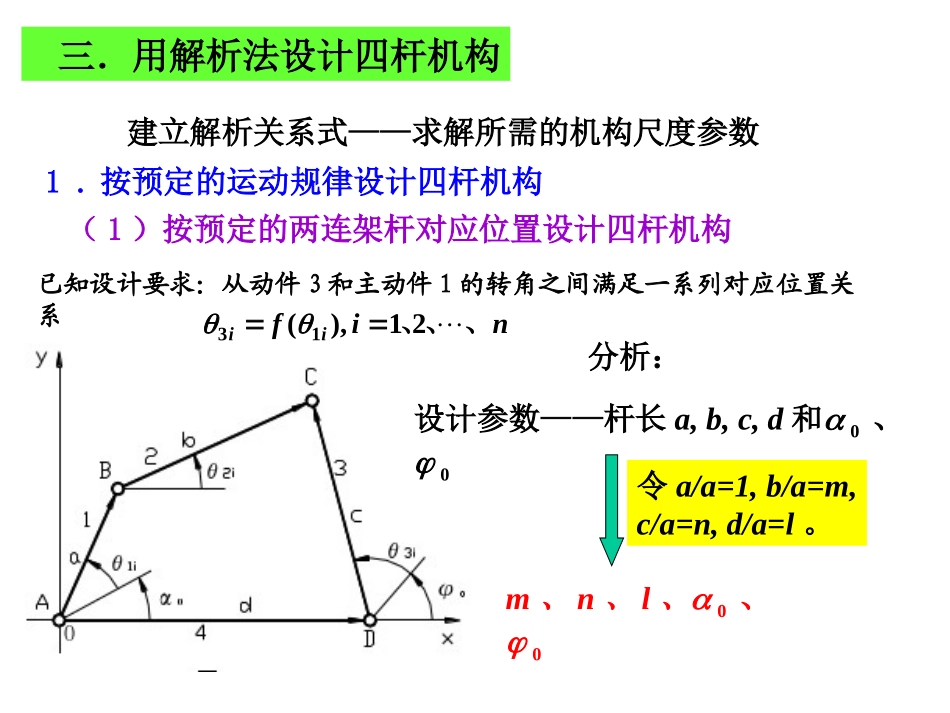
按预定的运动规律设计四杆机构(1)按预定的两连架杆对应位置设计四杆机构已知设计要求:从动件3和主动件1的转角之间满足一系列对应位置关系nifii、、、21),(13分析:设计参数——杆长a,b,c,d和0、0令a/a=1,b/a=m,c/a=n,d/a=l
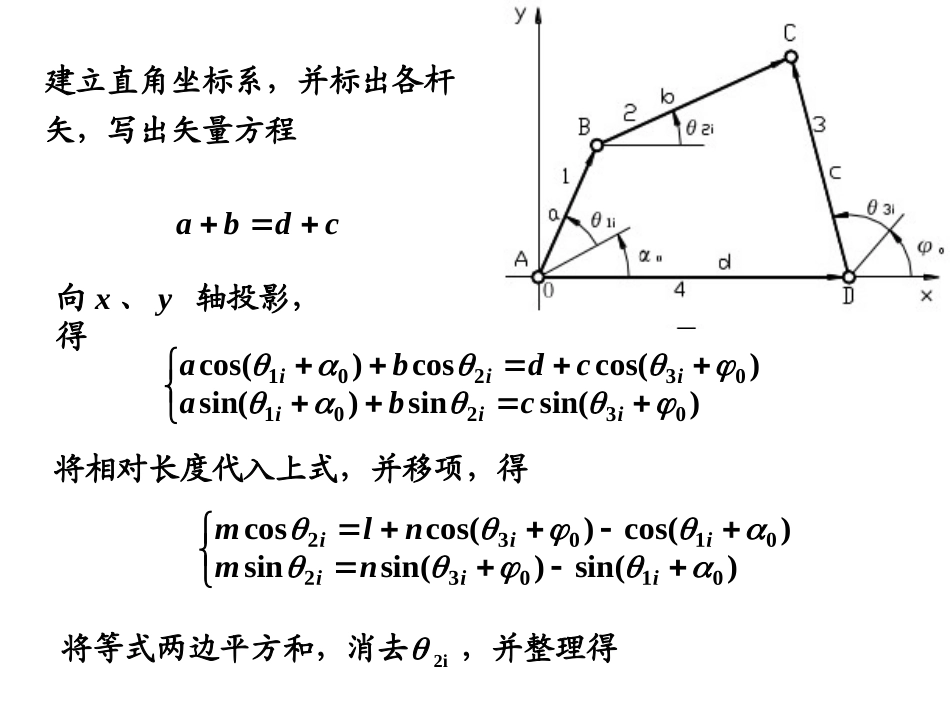
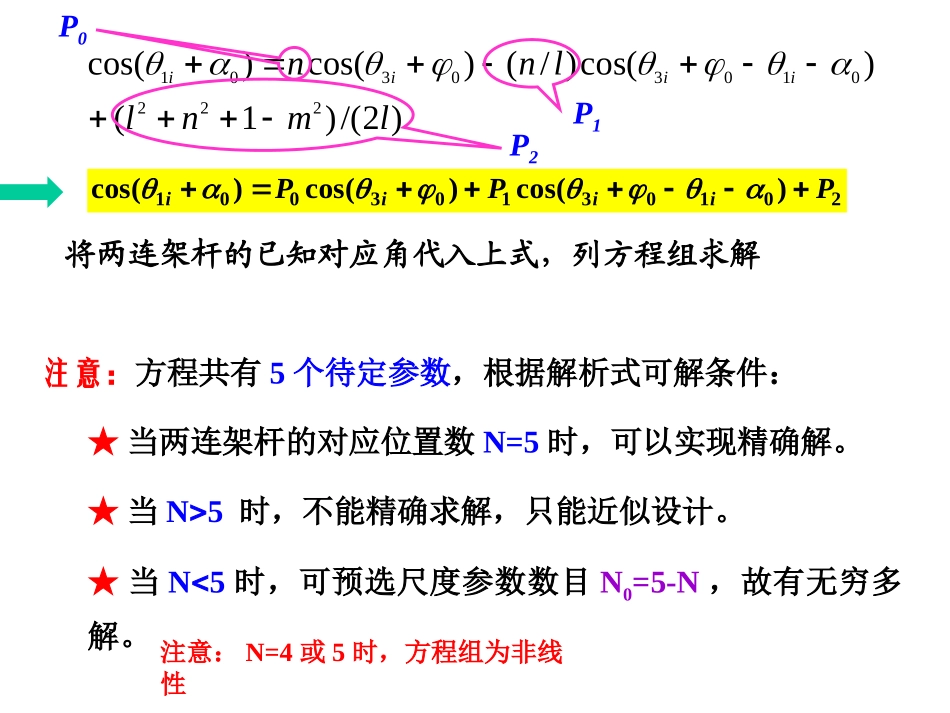
m、n、l、0、0建立直角坐标系,并标出各杆矢,写出矢量方程向x、y轴投影,得)sin(sin)sin()cos(cos)cos(0320103201iiiiiicbacdbacdba将相对长度代入上式,并移项,得)sin()sin(sin)cos()cos(cos0103201032iiiiiinmnlm将等式两边平方和,消去2i,并整理得)2/()1()cos()/()cos()cos(22201030301lmnllnniiiiP2P1P020103103001)cos()cos()cos(PPPiiii将两连架杆的已知对应角代入上式,列方程组求解注意:方程共有5个待定参数,根据解析式可解条件:★当两连架杆的对应位置数N=5时,可以实现精确解
★当N5时,不能精确求解,只能近似设计
★当N5时,可预选尺度参数数目N0=5-N,故有无穷多解
注意:N=4或5时,方程组为非线性例题:试设计如图所示铰链四杆机构,要求其两连架杆满足如下三组对应位置关系:11=45o,31=50o,12=90o,32=80o,13=135o,33=110o
分析:N=3则N0=2,常选0=0=0o求解:将三组对应位置值代入解析式得:20010002001000200