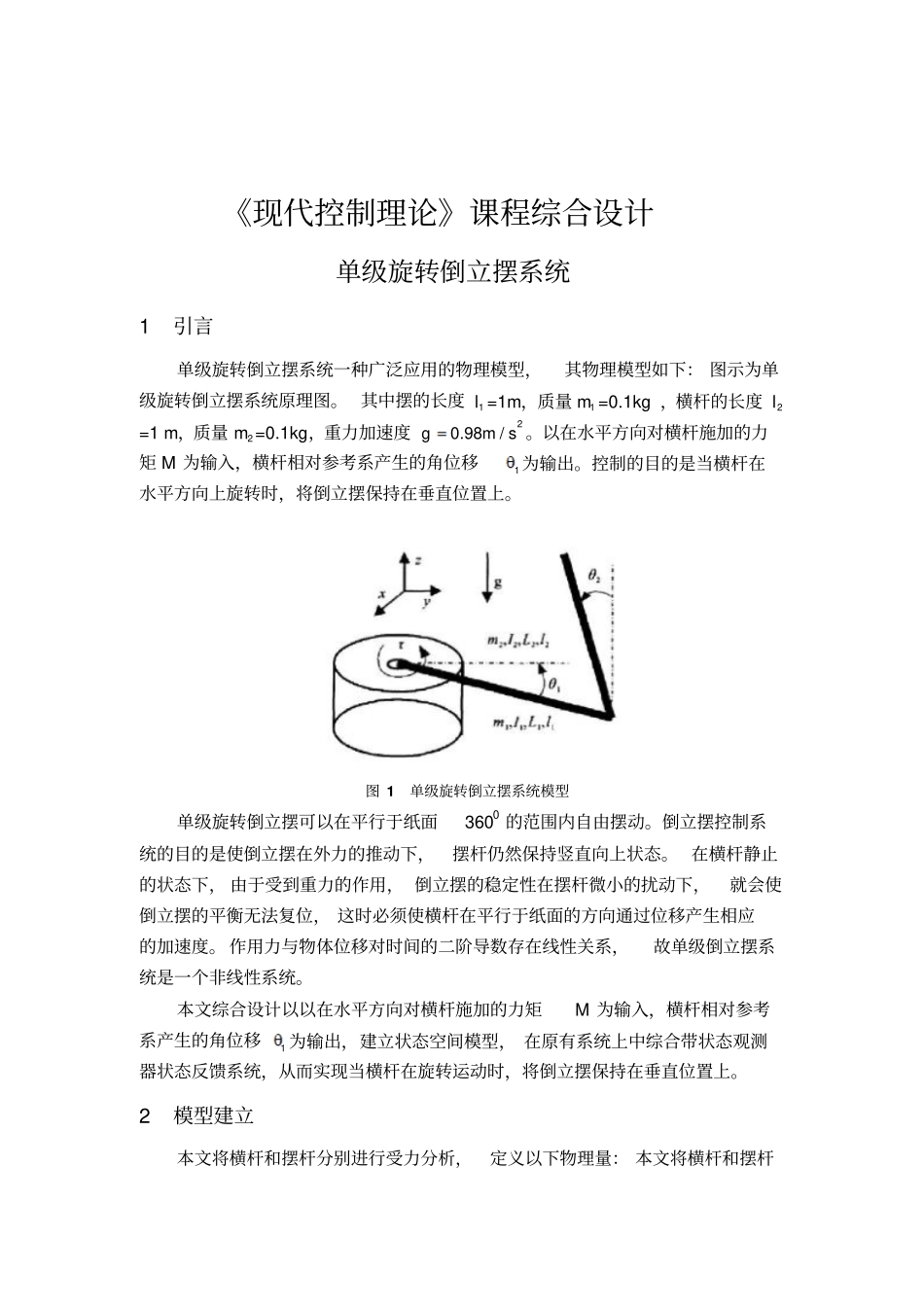
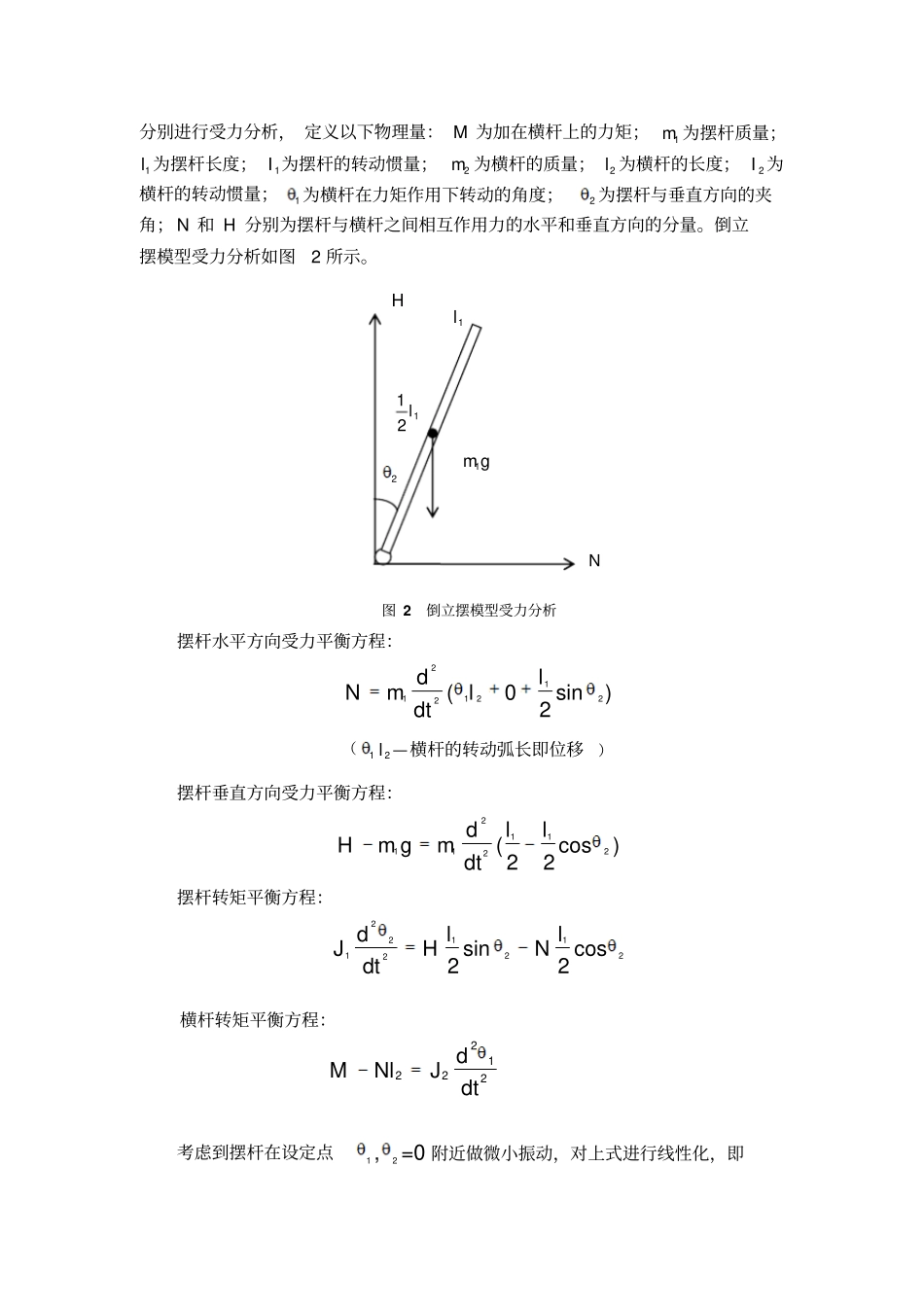
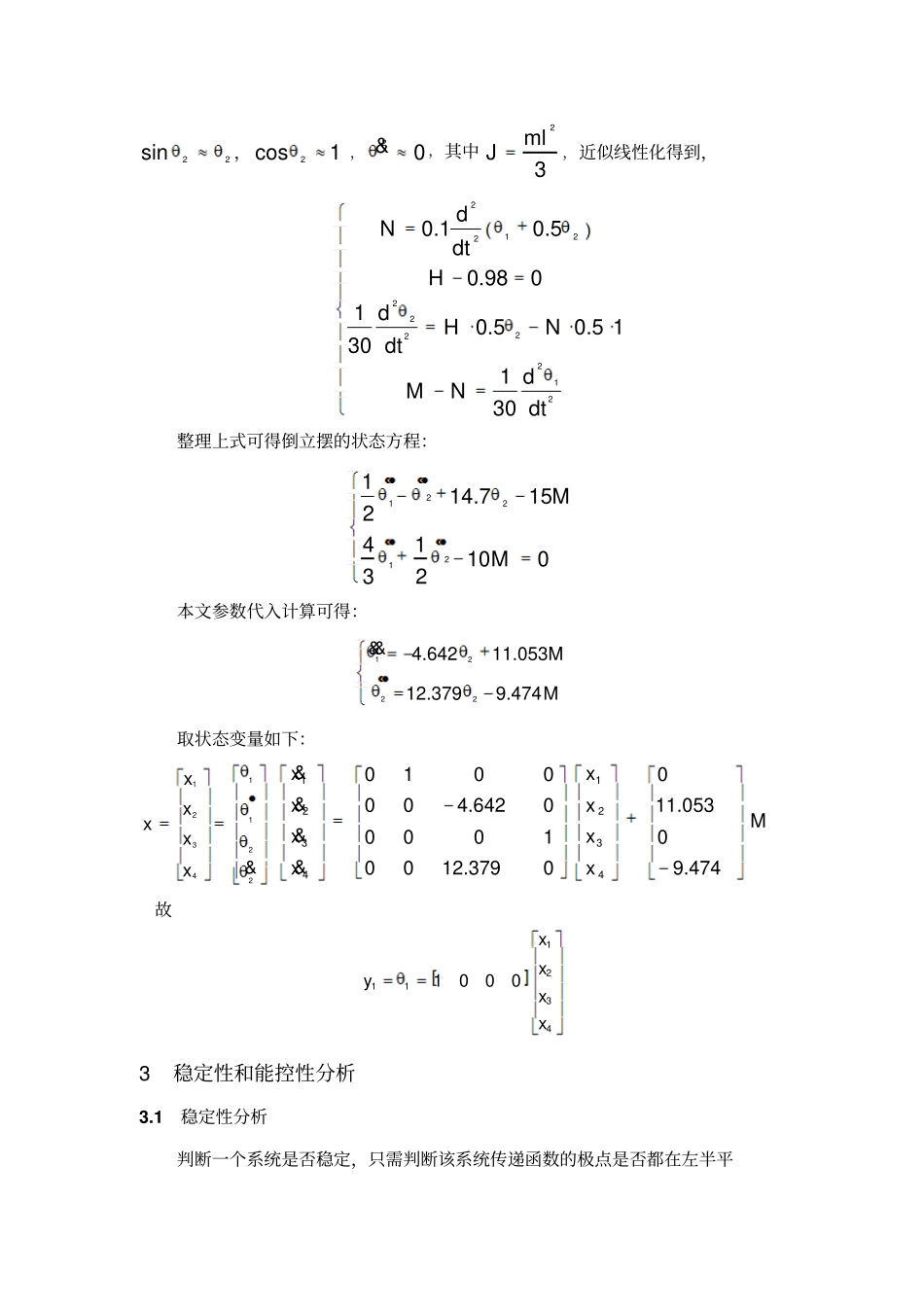
《现代控制理论》课程综合设计单级旋转倒立摆系统1引言单级旋转倒立摆系统一种广泛应用的物理模型,其物理模型如下:图示为单级旋转倒立摆系统原理图。其中摆的长度1l=1m,质量1m=0.1kg,横杆的长度2l=1m,质量2m=0.1kg,重力加速度20.98/gms。以在水平方向对横杆施加的力矩M为输入,横杆相对参考系产生的角位移1为输出。控制的目的是当横杆在水平方向上旋转时,将倒立摆保持在垂直位置上。图1单级旋转倒立摆系统模型单级旋转倒立摆可以在平行于纸面3600的范围内自由摆动。倒立摆控制系统的目的是使倒立摆在外力的推动下,摆杆仍然保持竖直向上状态。在横杆静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆微小的扰动下,就会使倒立摆的平衡无法复位,这时必须使横杆在平行于纸面的方向通过位移产生相应的加速度。作用力与物体位移对时间的二阶导数存在线性关系,故单级倒立摆系统是一个非线性系统。本文综合设计以以在水平方向对横杆施加的力矩M为输入,横杆相对参考系产生的角位移1为输出,建立状态空间模型,在原有系统上中综合带状态观测器状态反馈系统,从而实现当横杆在旋转运动时,将倒立摆保持在垂直位置上。2模型建立本文将横杆和摆杆分别进行受力分析,定义以下物理量:本文将横杆和摆杆分别进行受力分析,定义以下物理量:M为加在横杆上的力矩;1m为摆杆质量;1l为摆杆长度;1I为摆杆的转动惯量;2m为横杆的质量;2l为横杆的长度;2I为横杆的转动惯量;1为横杆在力矩作用下转动的角度;2为摆杆与垂直方向的夹角;N和H分别为摆杆与横杆之间相互作用力的水平和垂直方向的分量。倒立摆模型受力分析如图2所示。图2倒立摆模型受力分析摆杆水平方向受力平衡方程:2111222(0sin)2ldNmldt(12l—横杆的转动弧长即位移)摆杆垂直方向受力平衡方程:2111122(cos)22lldHmgmdt摆杆转矩平衡方程:22111222sincos22dllJHNdt横杆转矩平衡方程:21222dMNlJdt考虑到摆杆在设定点12,=0附近做微小振动,对上式进行线性化,即1mg2HN1l112l22sin,2cos1,20&,其中23mlJ,近似线性化得到,212222222120.10.50.98010.50.5130130dNdtHdHNdtdMNdt整理上式可得倒立摆的状态方程:21221114.71524110032MM本文参数代入计算可得:12224.64211.05312.3799.474MM&&取状态变量如下:11213242xxxxx&1122334400100004.642011.053000100012.37909.474xxxxMxxxx&&&&故1211341000xxyxx3稳定性和能控性分析3.1稳定性分析判断一个系统是否稳定,只需判断该系统传递函数的极点是否都在左半平面。编写Matlab语句可得该系统的传递函数,即A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0];B=[0;11.053;0;-9.474];C=[1,0,0,0];D=0;Gss=ss(A,B,C,D);G1=zpk(Gss)G1=11.053(s+2.898)(s-2.898)--------------------------s^2(s-3.518)(s+3.518)Continuous-timezero/pole/gainmodel.从结果可以看出,传递函数存在一个在复平面右半侧的极点,故该系统是不稳定的。3.2能控性分析判断系统是否完全能控,只需判断该系统能控性矩阵是否为满秩,即21nCQBABABAB若CrankQn,则该系统是完全能控的。根据Matlab语句中Qc=ctrb(A,B),即A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0];B=[0;11.053;0;-9.474];C=[1,0,0,0];Qc=ctrb(A,B);n1=rank(Qc)n1=4从结果可以看出该系统是完全能控的,可以实现任意极点的配置。3.3能观测性分析与判断能控性类似,只需判断该系统能观测性矩阵是否为满秩,即01nCCAQCA若0rankQn,该系统是完全能观测的。借用Matlab语句中Qo=obsv(A,C),即A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0];B=[0;11.053;0;-9.474];C=[1,0,0,0];Qo=obsv(A,C);n2=rank(Qo)n2=4从结果可以看出该系统是完全能观测的,故可以配置状态观测器4状态反馈分析4.1原系统Simulink仿真及分析根据现代控制原理,绘制原系统的状态模拟图,如图3所示。图3原系统状态模拟图运用MATLAB中的Simulink来对原系统进行仿真,首先可以得出原系统的Simulink仿真模型如下图4所示M-9.474-4.642y4x3x2x1x12.39711.053图4原系统Simulink仿真图通过Simulink仿真可以得到原系统的零状态响应,其中初始值2=0.174,M=0,响应曲线如下图所示图5原...