机械动力学大作业含弹性摆杆的铰链四杆机构动力学仿真学号:院系名称:机电工程学院专业:机械工程学生姓名:本次进行设计和分析的对象为平面铰链四杆机构,在Adams的环境下,通过对四杆机构进行建模以及运动仿真,绘制出摆杆的相关曲线图
为了形成有效的对比,先建立含有刚性摆杆的四杆机构,进行运动仿真,绘制出摆杆的相关曲线
再建立含有柔性摆杆的铰链四杆机构,所有参数设置均和刚性摆杆一样
考虑到弹性摇杆可能发生较大的形变,不利于观测,绘制摇杆运动曲线时选择摇杆的质心作为参考点
在Adams中主要有三种方法创建柔性构件,第一种是将刚性构件离散化后采用柔性梁连接;第二种是直接将刚体替换为柔性体;第三种是运用有限元分析的方法建立柔性构件
本次建模,主要采用前两种方法建立柔性摆杆
运用有限元建立柔性构件,等以后再进行深入研究
同时两种方法建立的柔性杆可以形成对比
通过本次设计,主要学习了Adams软件建模以及运动仿真、图形处理、刚柔混合建模的操作方法,对自己也是一个很大锻炼和提升
设计的为平面曲柄摇杆机构
相关参数如:曲柄长L=200mm,宽W=60mm,高D=30mm;连杆长L=427mm,宽W=30mm,高D=20mm;摇杆长L=403mm,宽W=40mm,高D=20mm;机架长L=600mm,宽W=40mm,高D=20mm;曲柄角速度为40deg/sec
经过验证,最短杆长度加上最长杆长度小于中间两根杆的长度之和,满足曲柄存在的条件,且最长杆为机架,故为曲柄摇杆机构
一、建模过程1、建立四个标记点,这四个点依次连接就可以确定一个铰链四杆机构
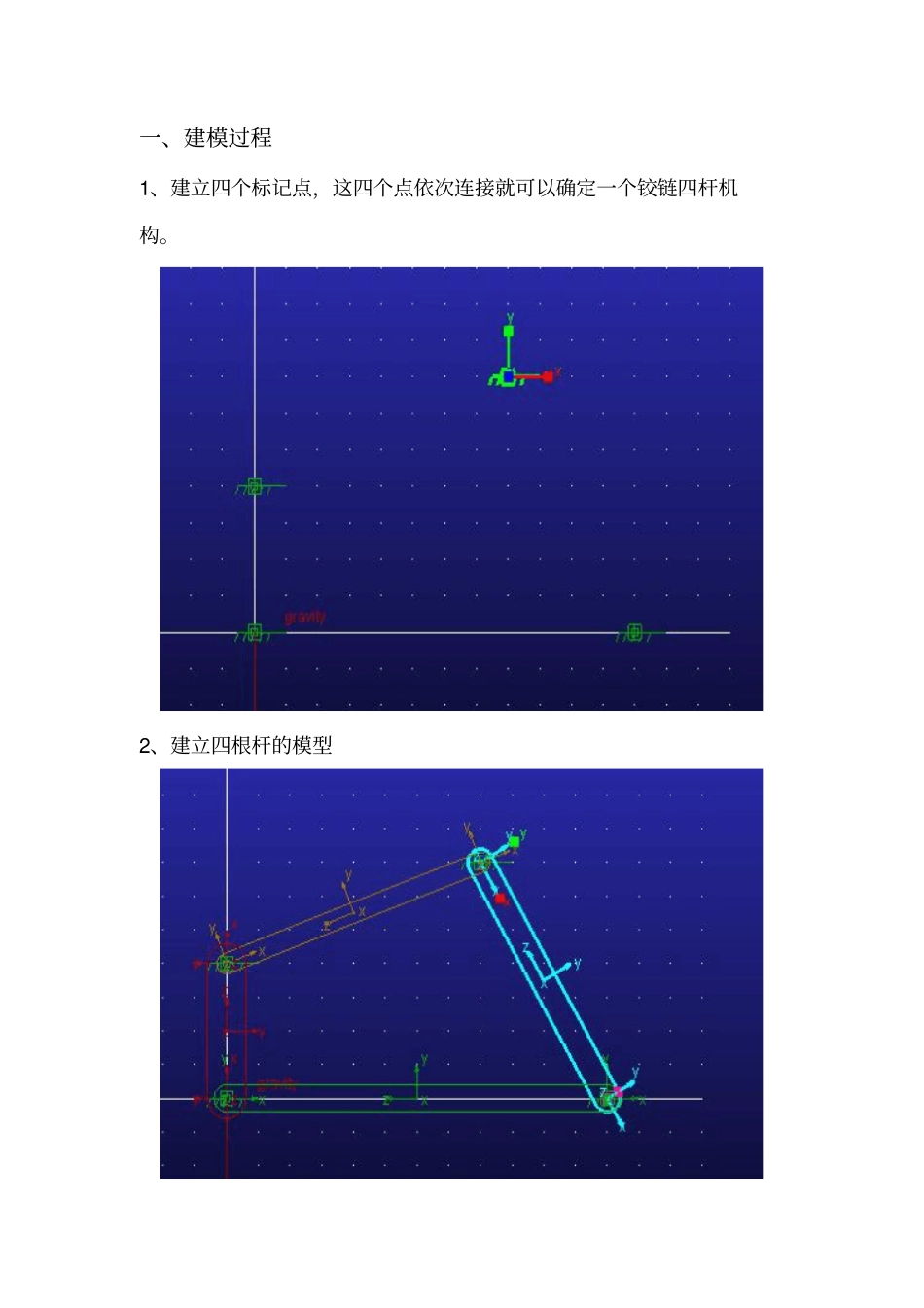
2、建立四根杆的模型3、在杆件之间添加转动副4、选择最长杆为机架并固定5、给曲柄添加驱动,使曲柄角速度为40deg/sec
6、使模型的显示方式为实体显示7、进行运动仿真,主要通过时间和步长来控制仿真运动的快慢
8、载入动画,进行图像处理,绘制曲线图