目录一、步进电机控制系统的设计1、设计目的2、实验仪器3、步进电机的基本工作原理4、步进电机控制的设计内容系统硬件设计系统软件设计5、结束语二、炉温控制系统的设计1、设计目的2、设计要求3、设计原理4、设计过程系统硬件设计系统软件设计5、结束语三、直流电机调速系统的设计1、设计目的2、设计要求3、设计过程系统硬件设计系统软件设计四、设计总结及心得体会一、步进电机的控制系统设计一、设计目的1.了解步进电机的工作原理
2.掌握步进电机的驱动及编程方法
二、实验仪器1.EL-CAT-III型计算机控制系统实验箱一台2.PC计算机一台3.步进电机控制实验对象一台三、步进电机的基本工作原理:步进电机的工作就是步进转动
在一般的步进电机工作中,其电源是采用单极性的直流电源
要使步进电机转动,就必须对步进电机的各相绕组以适当的时序进行通电
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(成为“步距角”),它的旋转是以固定的角度一步一步运行的
因此,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的
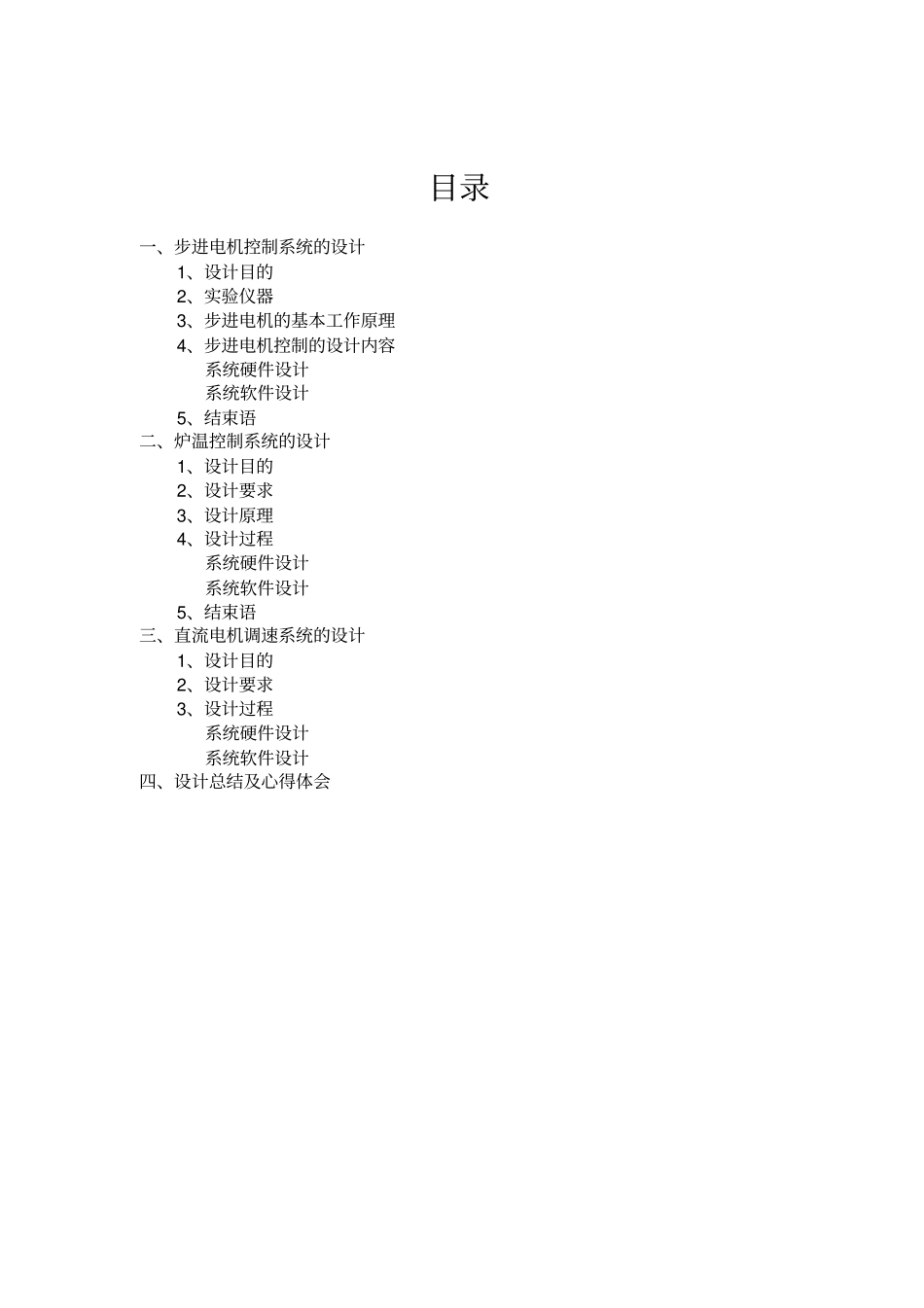
本实验步进电机的工作方式为两相四拍式,其电机的通电顺序如下图所示:相顺序ABCD01100101102001131001四、步进电机控制实验内容:1、硬件设计(1)、实验框图2、软件仿真步进电机采用的是开环控制
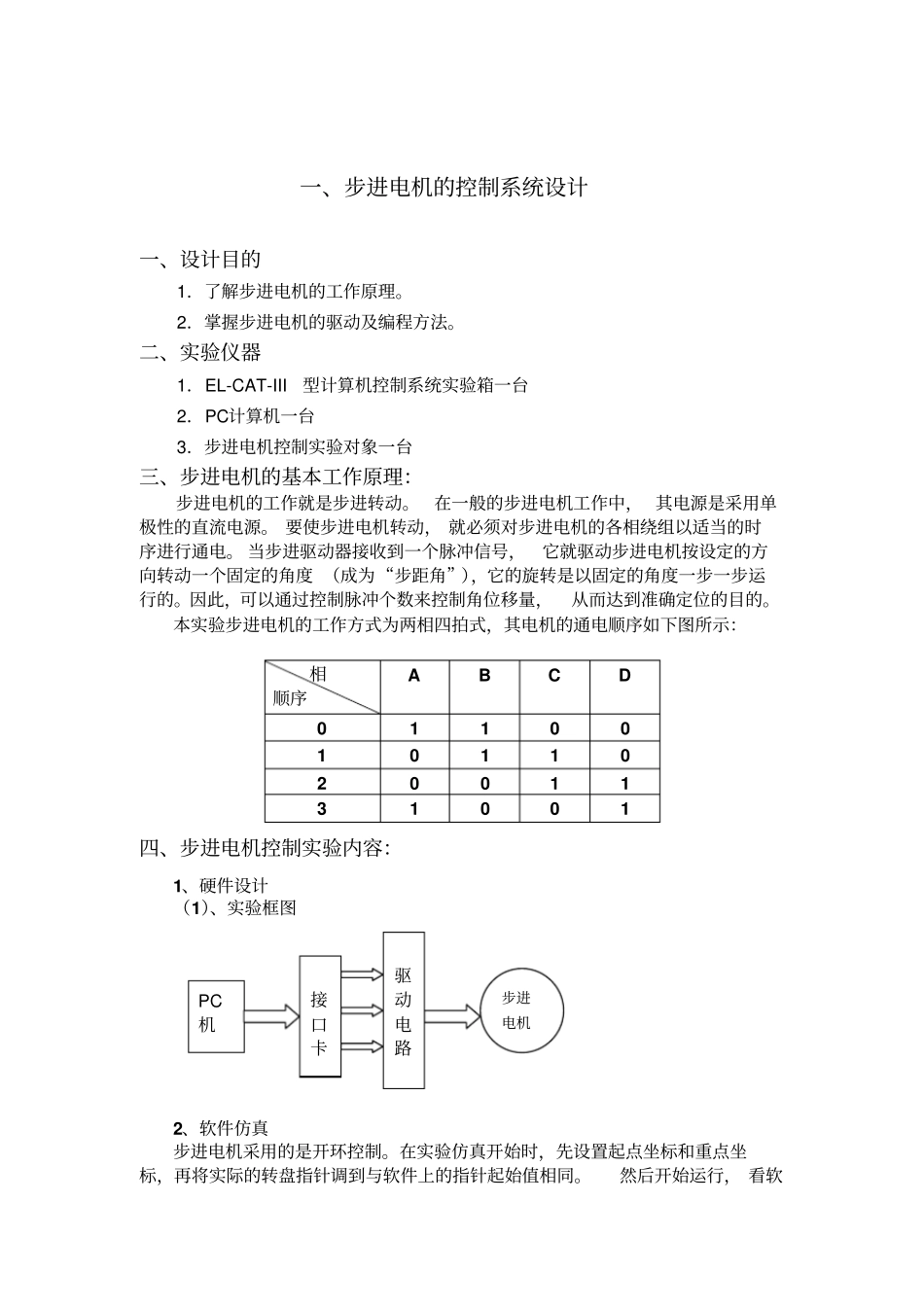
在实验仿真开始时,先设置起点坐标和重点坐标,再将实际的转盘指针调到与软件上的指针起始值相同
然后开始运行,看软驱动电路接口卡PC机步进电机件仿真指针所转角度是否与实际相同
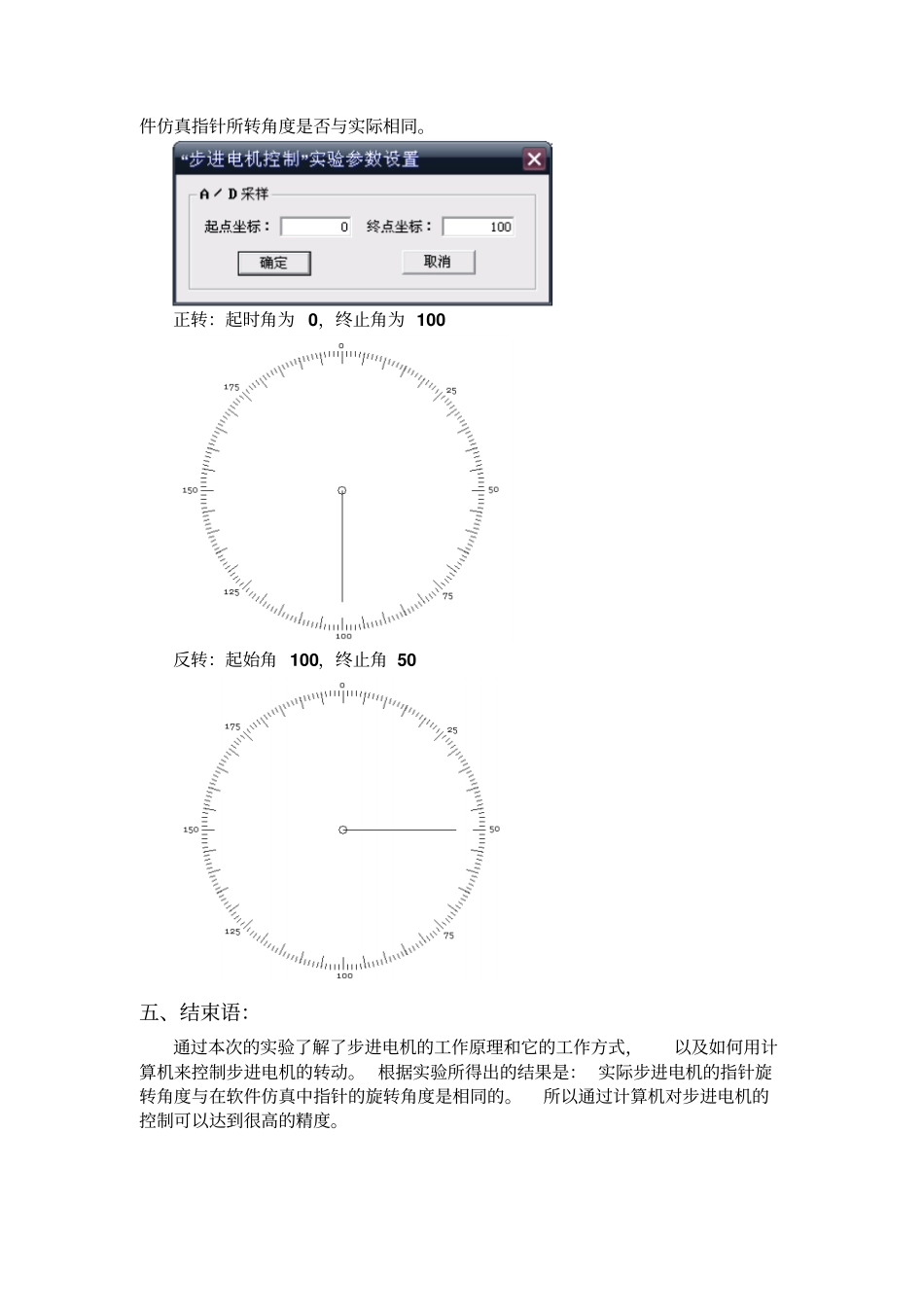
正转:起时角为0,终止角为100反转:起始角100,终止角50五、结束语:通过本次的实验了解了步进电机的工作原理和它的工作方式,以及如何用计算机来控制步进电机的转动
根据实验所得出的结果是:实际步进电机的指针旋转角度与在软件仿真中指针的旋转角度是相同的
所以通过计算机对步进电机