1封装纸2简易自动控制小车(D题)摘要本系统以AT89C51单片机作为自动小车的检测和控制核心,对小车的整个行驶过程进行实时监控
采用一体化反射接近开关LTH-1650-01为数据采集部件,用马达控制驱动芯片LG9110驱动小车的前进与停车,小车可以在行进的同时计算里程,并在到达预设终点停车时交替显示路程与速度,这样就组成了一个比较完整的自动测控系统
该系统基于可靠的硬件设计和软件的浮点运算,实现了小车在行进和检测过程中的精确控制,整个系统的电路结构简单,可靠性高
实验测试结果满足要求
本系统的创新点是用声控方法控制小车的启动并在停车后能显示平均时速
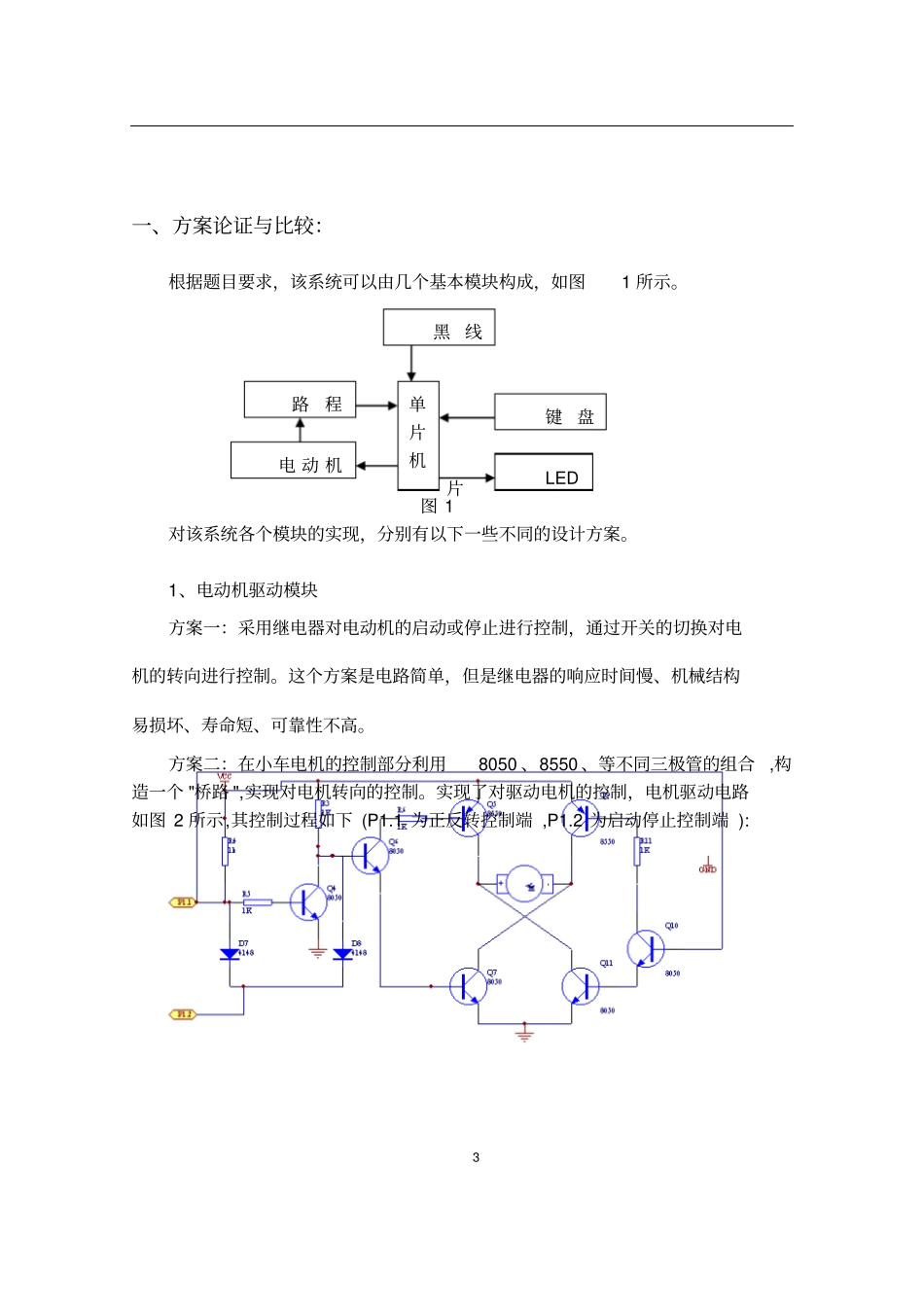
3一、方案论证与比较:根据题目要求,该系统可以由几个基本模块构成,如图1所示
图1对该系统各个模块的实现,分别有以下一些不同的设计方案
1、电动机驱动模块方案一:采用继电器对电动机的启动或停止进行控制,通过开关的切换对电机的转向进行控制
这个方案是电路简单,但是继电器的响应时间慢、机械结构易损坏、寿命短、可靠性不高
方案二:在小车电机的控制部分利用8050、8550、等不同三极管的组合,构造一个"桥路",实现对电机转向的控制
实现了对驱动电机的控制,电机驱动电路如图2所示,其控制过程如下(P1
1为正反转控制端,P1
2为启动停止控制端):黑线键盘路程单片机片LED电动机4图2方案三:用马达控制驱动芯片LG9110来驱动电机,电机驱动电路如图3所示:图3通过比较以上三种方案的比较并且结合实际情况,选择方案二与方案三,方案二的“桥路”的优点是原理简单、易控制、带载能力强,在单片机的配合下,使该系统完成基本要求的过程变得简单易行,因而采用方案二来驱动前轮电机;方案三使用LG9110既电路简单价格低廉,并且输出电流大,只须控制LG9110芯片的第6和第7管脚的电平就可控制电机的正转、反转及停止,所以我们利用方案三来驱动后轮电机的转动