1第四节简谐激励振动理论的应用一、旋转不平衡质量引起的强迫振动(一)运动方程及其解在高速旋转机械中,偏心质量产生的离心惯性力是主要的激励来源之一
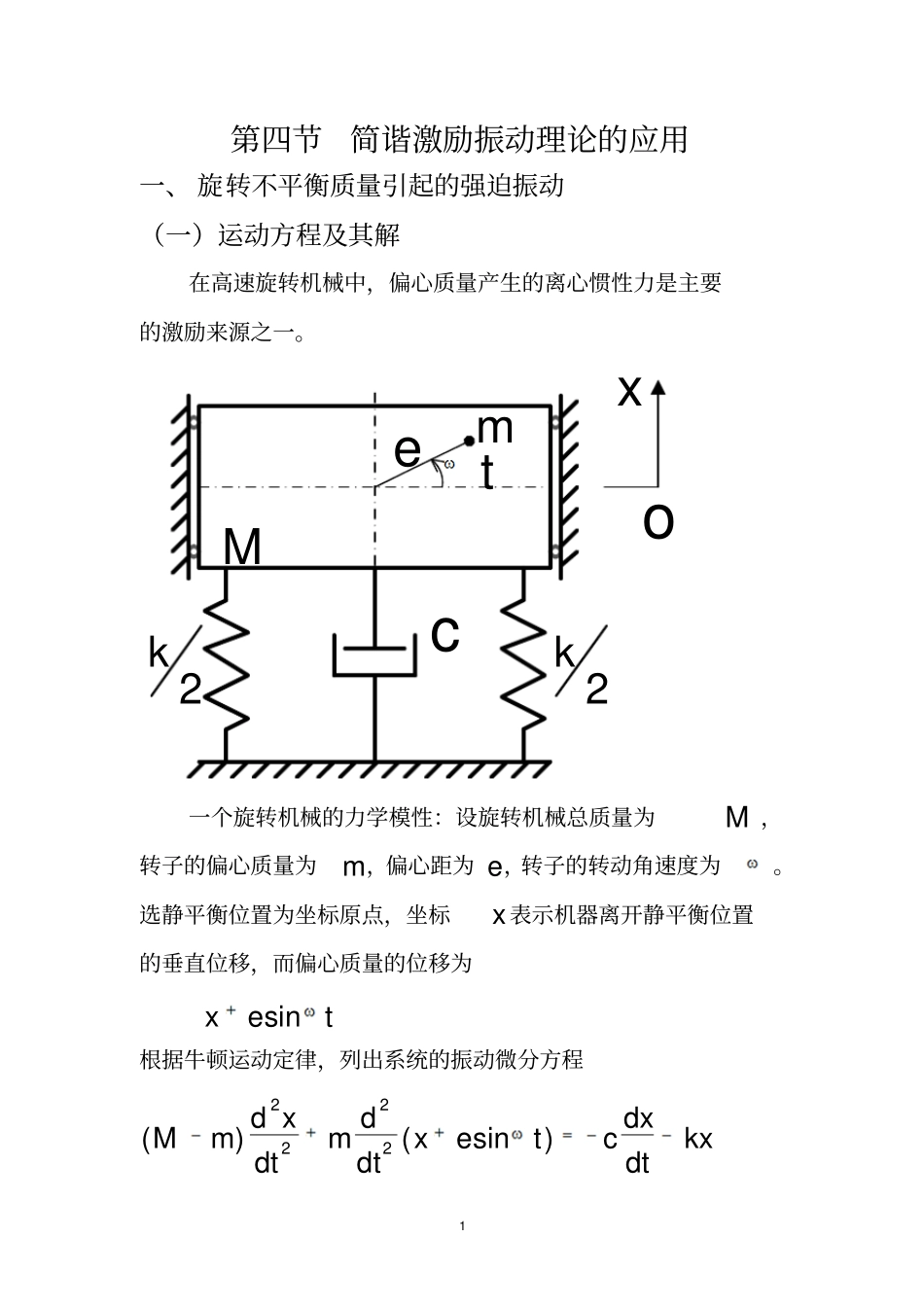
Memt2k2kcxo一个旋转机械的力学模性:设旋转机械总质量为M,转子的偏心质量为m,偏心距为e,转子的转动角速度为
选静平衡位置为坐标原点,坐标x表示机器离开静平衡位置的垂直位移,而偏心质量的位移为sinxet根据牛顿运动定律,列出系统的振动微分方程2222()(sin)dxddxMmmxetckxdtdtdt2整理后,得2sinMxcxkxmet(3-18)上式的形式与方程(3-1)相似,只是由2me代替了0F,故前面所有的分析都可适用
设nkM,2ncM,nr则方程(3-18)的稳态响应为()sin()xtXt式中振幅X为222222222222()()1(1)(2)(1)(2)meXkMcmekrrmerMrr显然,相位差为2221crtgkmr可见,偏心质量引起的强迫振动的振幅与不平衡质量me成正比
为了减小振动,旋转机械的转子通常要作平衡试验,使质量分布尽可能均匀
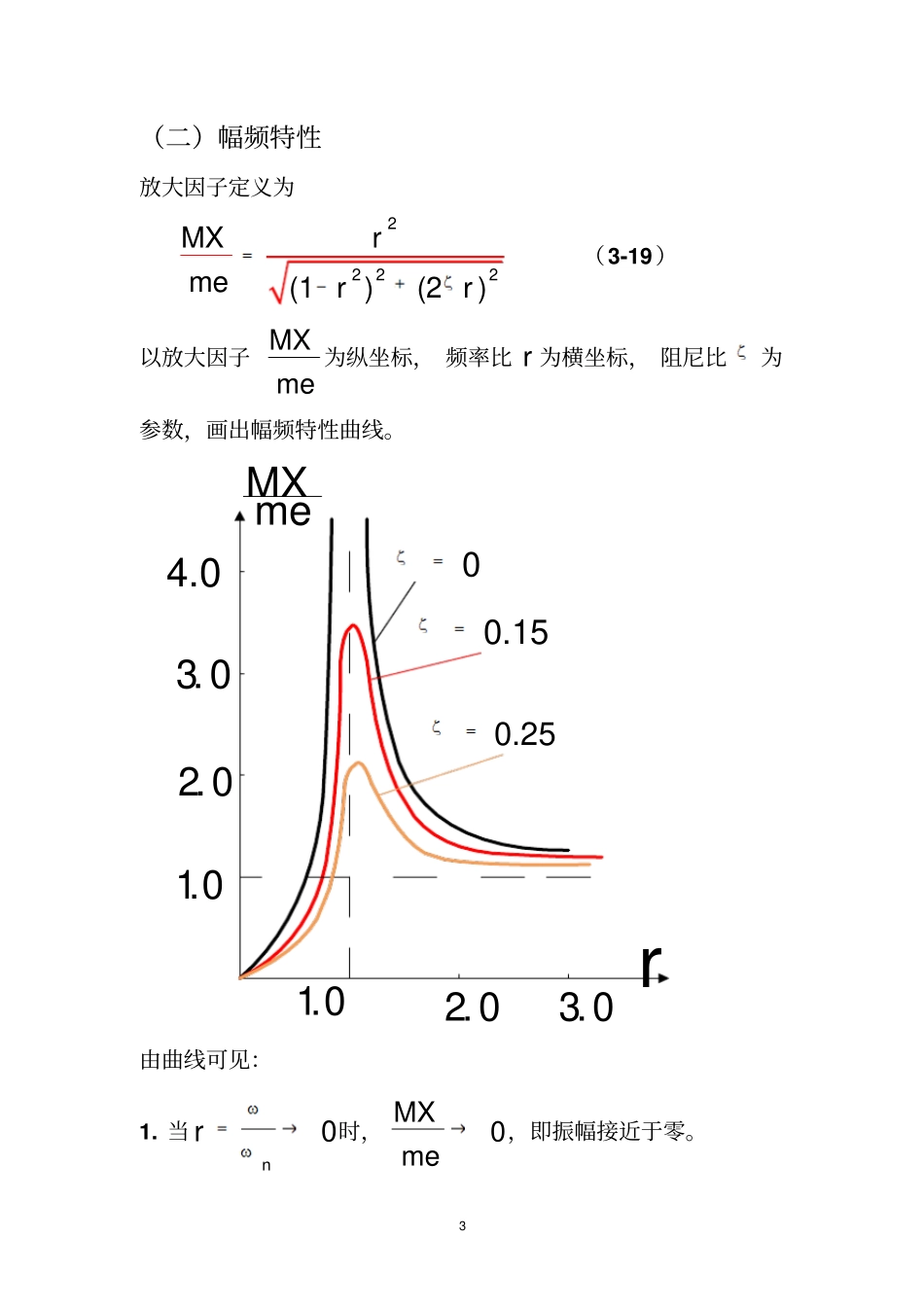
3(二)幅频特性放大因子定义为2222(1)(2)MXrmerr(3-19)以放大因子MXme为纵坐标,频率比r为横坐标,阻尼比为参数,画出幅频特性曲线
0MXmer00
25由曲线可见:1
当0nr时,0MXme,即振幅接近于零
当1nr时,1MXme,即振幅趋近于常数,即meXM而与激励频率及阻尼比基本上无关
共振发生在2112r即212n时,位于1r的右边,共振振幅为2121meXM当阻尼很小时(0
2),可以认为当1r即n发生共振,共振振幅为2memeXMc5例题:一台惯性式激振器安放在机器正上方,以测定机器的振动特性
激振器有一对带有偏心质量、等速反向旋转的齿轮组成
当旋转角速度ω为时,偏