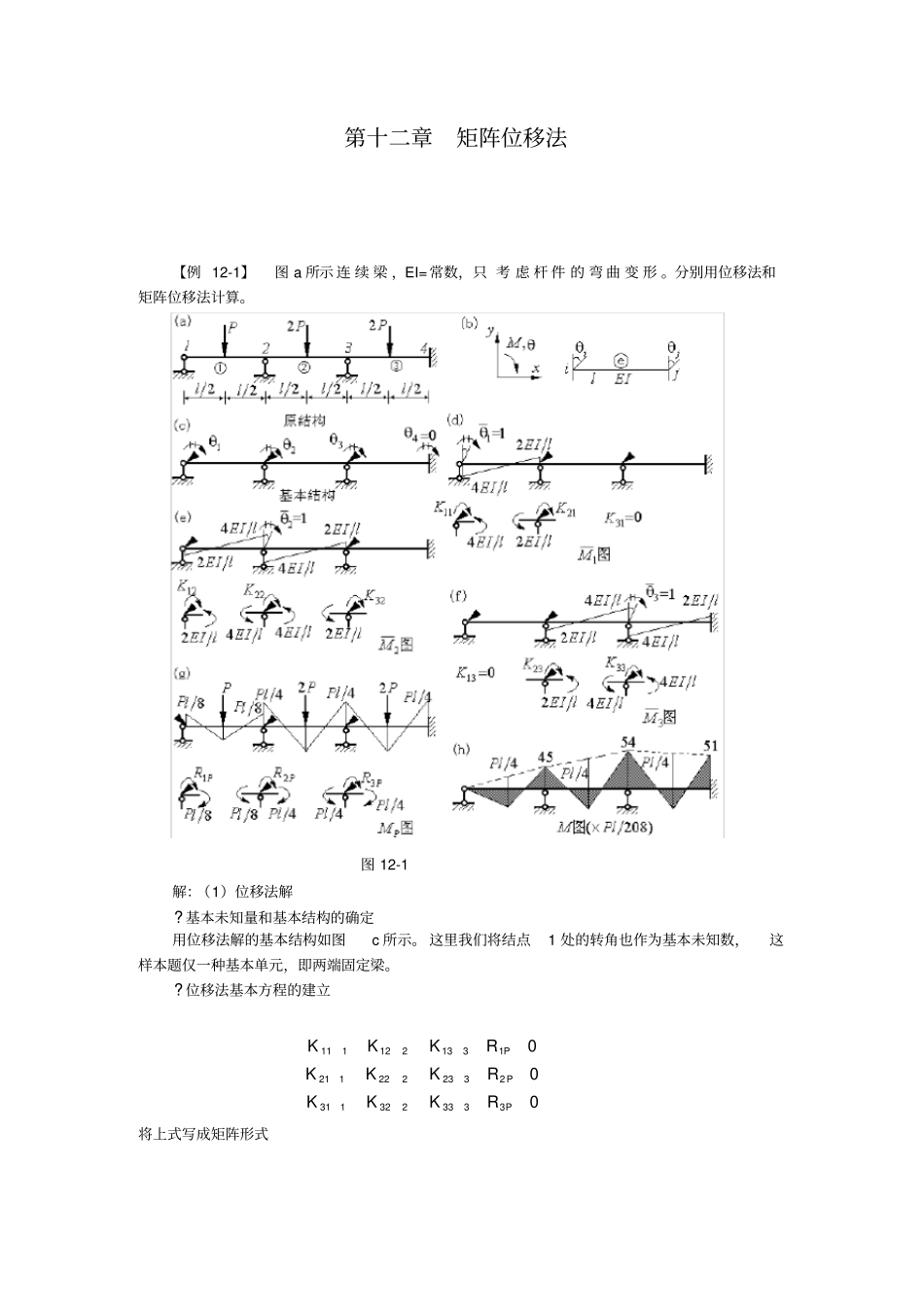
第十二章矩阵位移法【例12-1】图a所示连续梁,EI=常数,只考虑杆件的弯曲变形
分别用位移法和矩阵位移法计算
图12-1解:(1)位移法解
基本未知量和基本结构的确定用位移法解的基本结构如图c所示
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁
位移法基本方程的建立000333323213123232221211313212111PPPRKKKRKKKRKKK将上式写成矩阵形式000321321333231232221131211PPPRRRKKKKKKKKK
系数项和自由项计算(须绘出单位弯矩图和荷载弯矩图)由图d,结点力矩平衡条件0M,得lEIK411,lEIK221,031K由图e,结点力矩平衡条件0M,得lEIK212,lEIlEIlEIK84422,lEIK232由图f,结点力矩平衡条件0M,得013K,lEIK223,lEIlEIlEIK84433由图g,结点力矩平衡条件0M,得81PlRp,82PlRP,03PR将系数项和自由项代入位移法基本方程,得0000118820282024321PllEI
解方程,得14114162321EIPl
由叠加法绘弯矩图,如图h所示
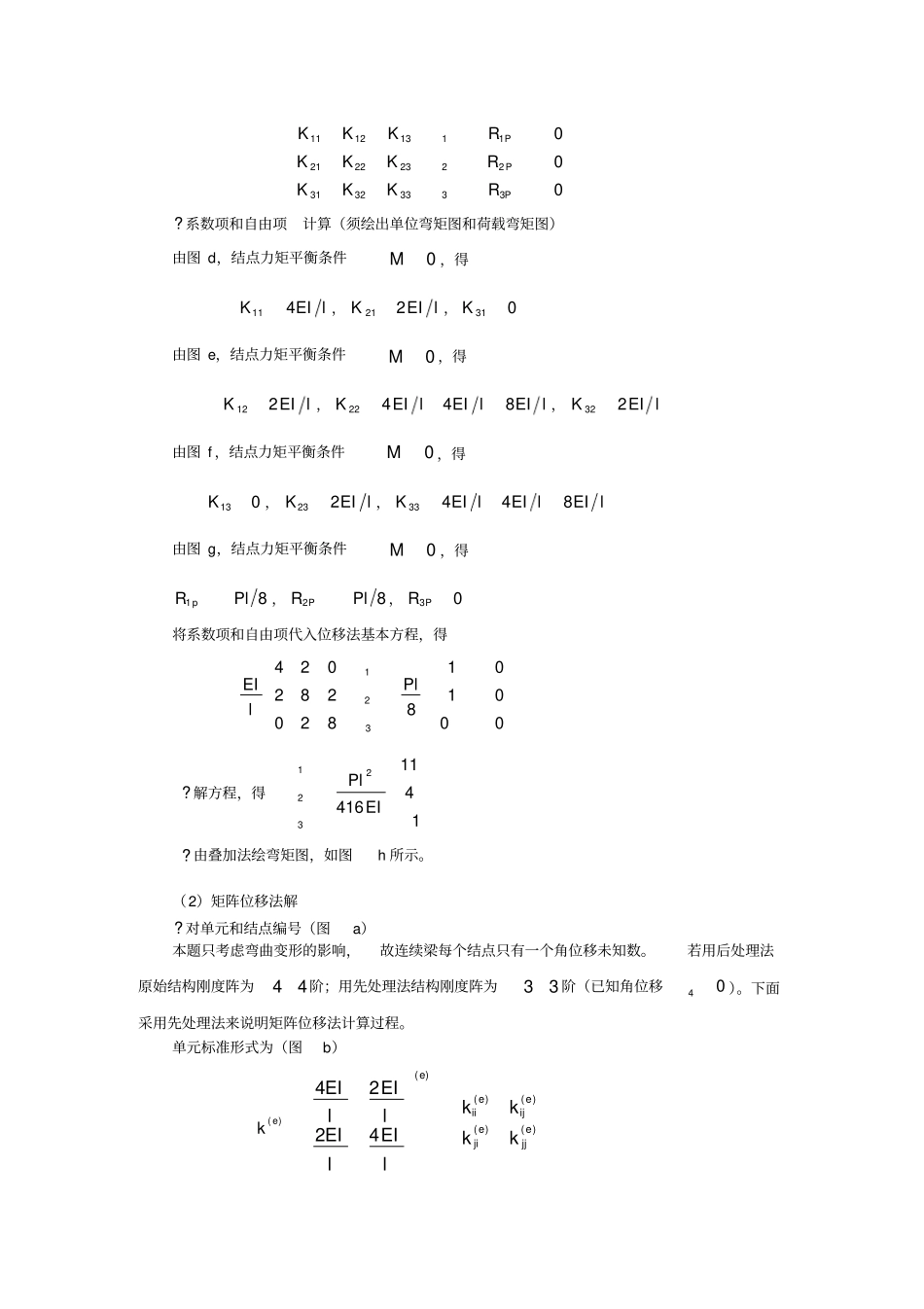
(2)矩阵位移法解
对单元和结点编号(图a)本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数
若用后处理法原始结构刚度阵为44阶;用先处理法结构刚度阵为33阶(已知角位移04)
下面采用先处理法来说明矩阵位移法计算过程
单元标准形式为(图b))(ek)()()()()(4224ejjejieijeiiekkkklEIlEIlEIlEI
求局部坐标系下的单元刚度矩阵)(ek
求整体坐标下的单元刚度矩阵TkTkeTe)()(,因连续梁的局部坐标和整体坐标是一致的,所以有)()(eekk,得(注:本题用先处理法换码))1(k214224)1(lEI,)