2016-2017学年电子设计自动化[作业1]小车四个轮子的驱动电机为四个4
5V的直流电机,请以FPGA为控制芯片,以L298为驱动芯片,设计并搭建小车的控制及驱动电路,并用VerilogHDL编写电机的驱动控制程序,实现对小车左转、右转、直行、后退等行进方向和行进速度的控制
要求设置若干开关,分别用于控制小车的左转、右转、直行、后退、停止及速度
课程:电子设计自动化教师:张怡学号:2014*6姓名:********西南交通大学一、任务要求小车四个轮子的驱动电机为四个4
5V的直流电机,请以FPGA为控制芯片,以L298为驱动芯片,设计并搭建小车的控制及驱动电路,并用VerilogHDL编写电机的驱动及控制程序,实现对小车左转、右转、直行、后退等行进方向和行进速度的控制
要求设置若干开关,分别用于控制小车的左转、右转、直行、后退、停止及速度
二、实现方案主要方案:以FPGA为控制芯片,以L298为驱动芯片
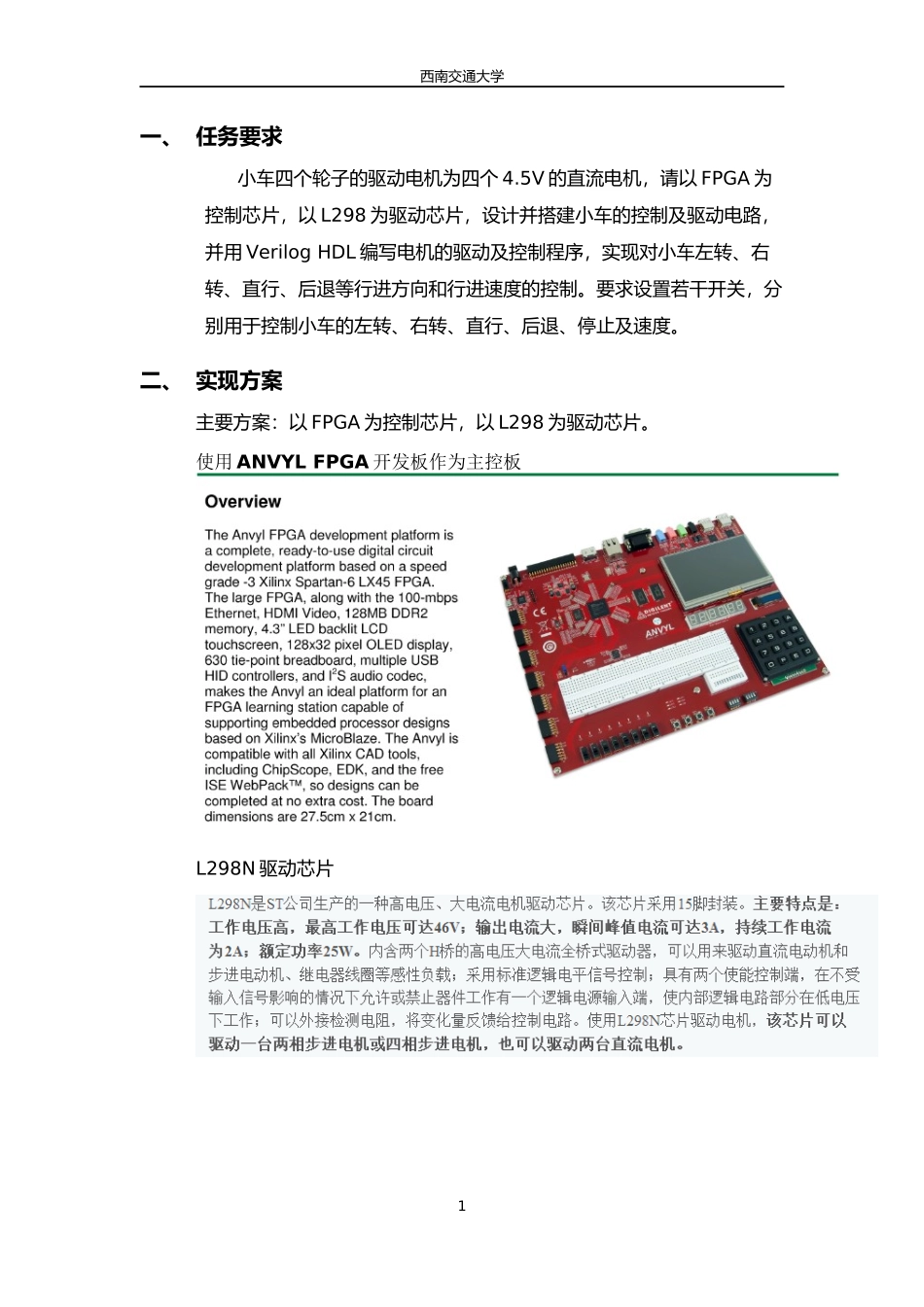
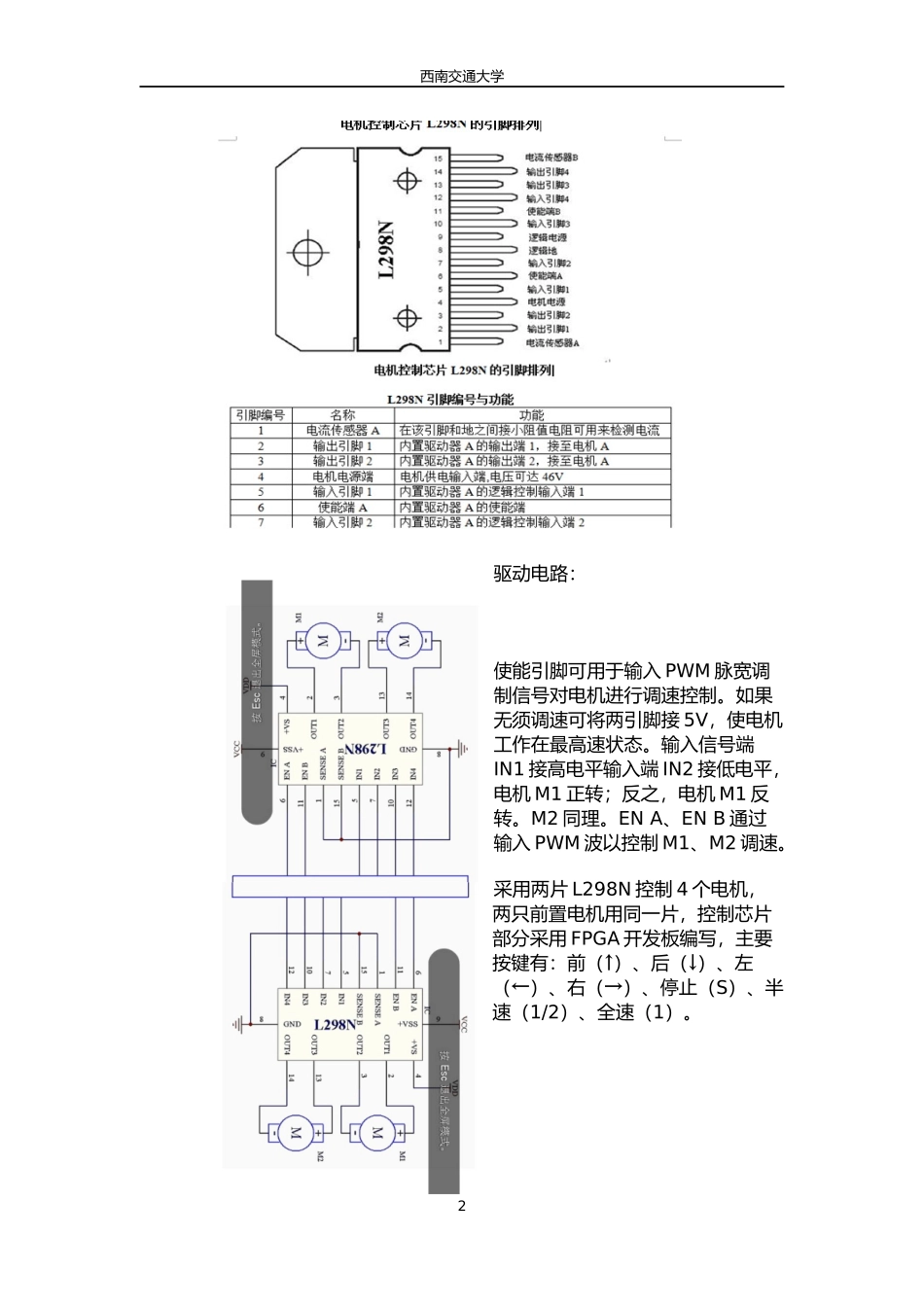
使用ANVYLFPGA开发板作为主控板L298N驱动芯片1西南交通大学驱动电路:使能引脚可用于输入PWM脉宽调制信号对电机进行调速控制
如果无须调速可将两引脚接5V,使电机工作在最高速状态
输入信号端IN1接高电平输入端IN2接低电平,电机M1正转;反之,电机M1反转
ENA、ENB通过输入PWM波以控制M1、M2调速
采用两片L298N控制4个电机,两只前置电机用同一片,控制芯片部分采用FPGA开发板编写,主要按键有:前(↑)、后(↓)、左(←)、右(→)、停止(S)、半速(1/2)、全速(1)
2西南交通大学片1:控制前面两只轮子,A为左片2:控制后面两只轮子,A为左左转:左前轮停止,其余正常右转:右前轮停止,其余正常停止:片1片2使能为零半速(1/2):片1片2使能为pwm调制波,占空比50%全速(1):片1片2使能为pwm调制波,占空比100%FPGA