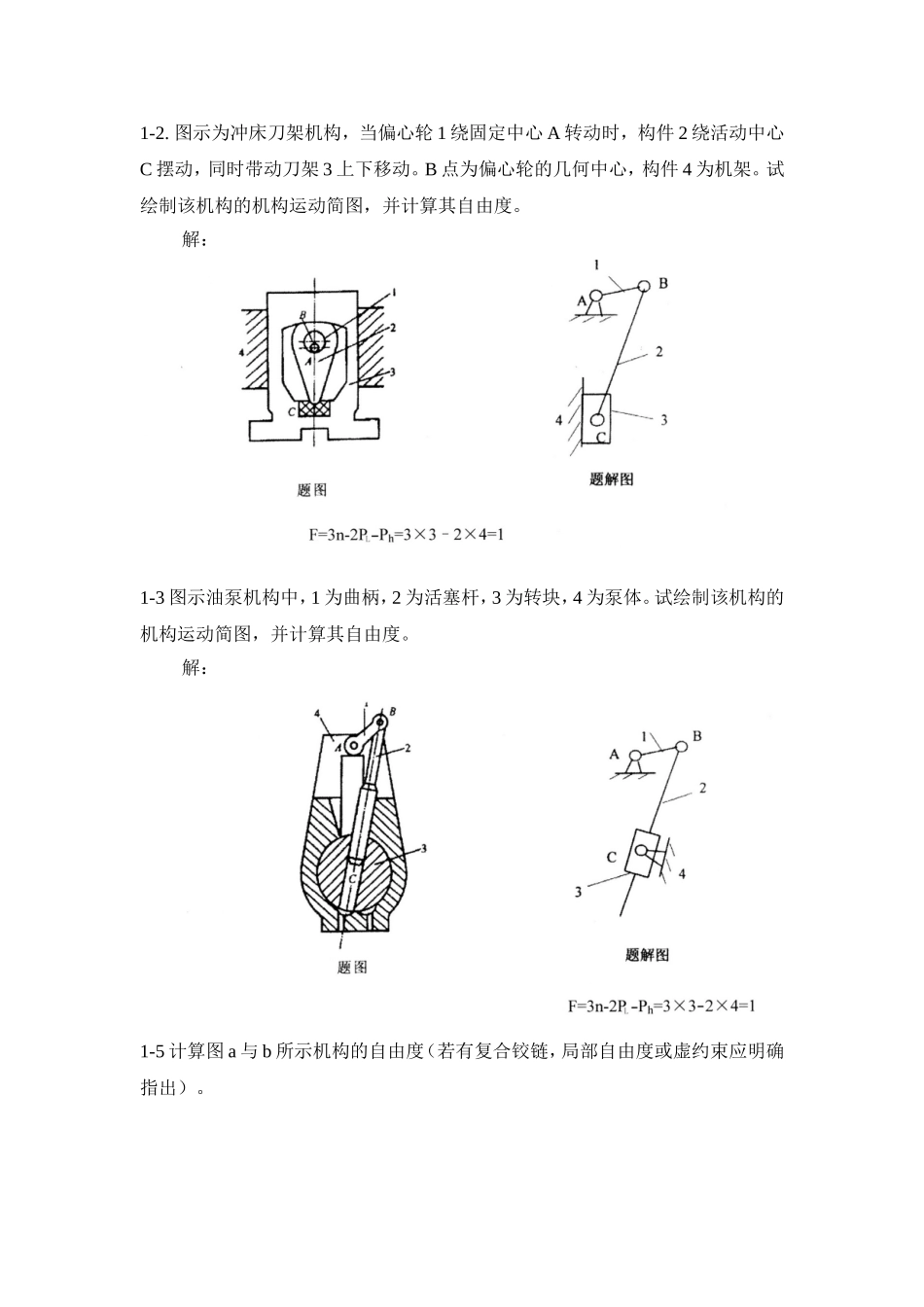
图示为冲床刀架机构,当偏心轮1绕固定中心A转动时,构件2绕活动中心C摆动,同时带动刀架3上下移动
B点为偏心轮的几何中心,构件4为机架
试绘制该机构的机构运动简图,并计算其自由度
解:1-3图示油泵机构中,1为曲柄,2为活塞杆,3为转块,4为泵体
试绘制该机构的机构运动简图,并计算其自由度
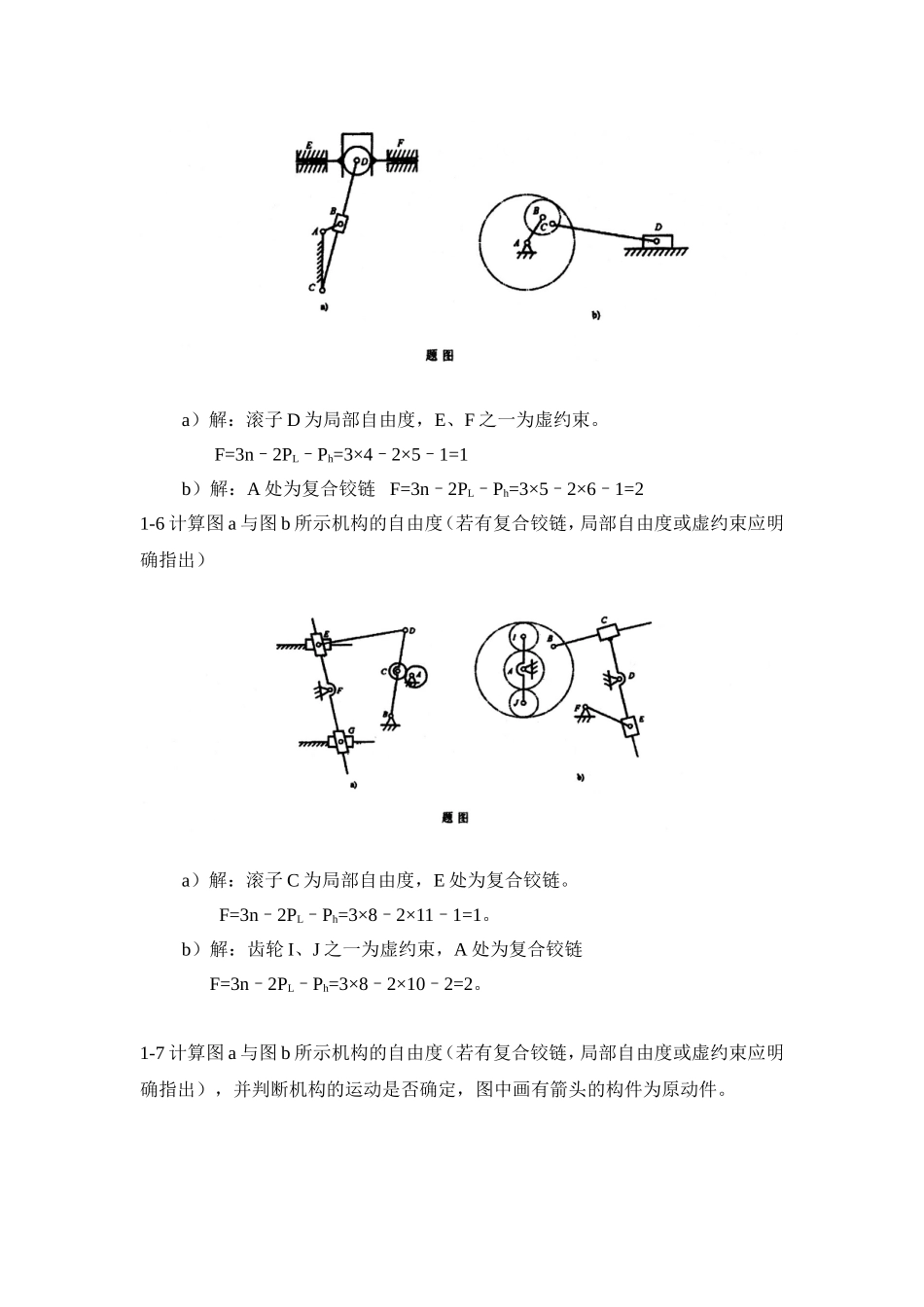
解:1-5计算图a与b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出)
a)解:滚子D为局部自由度,E、F之一为虚约束
F=3n–2PL–Ph=3×4–2×5–1=1b)解:A处为复合铰链F=3n–2PL–Ph=3×5–2×6–1=21-6计算图a与图b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出)a)解:滚子C为局部自由度,E处为复合铰链
F=3n–2PL–Ph=3×8–2×11–1=1
b)解:齿轮I、J之一为虚约束,A处为复合铰链F=3n–2PL–Ph=3×8–2×10–2=2
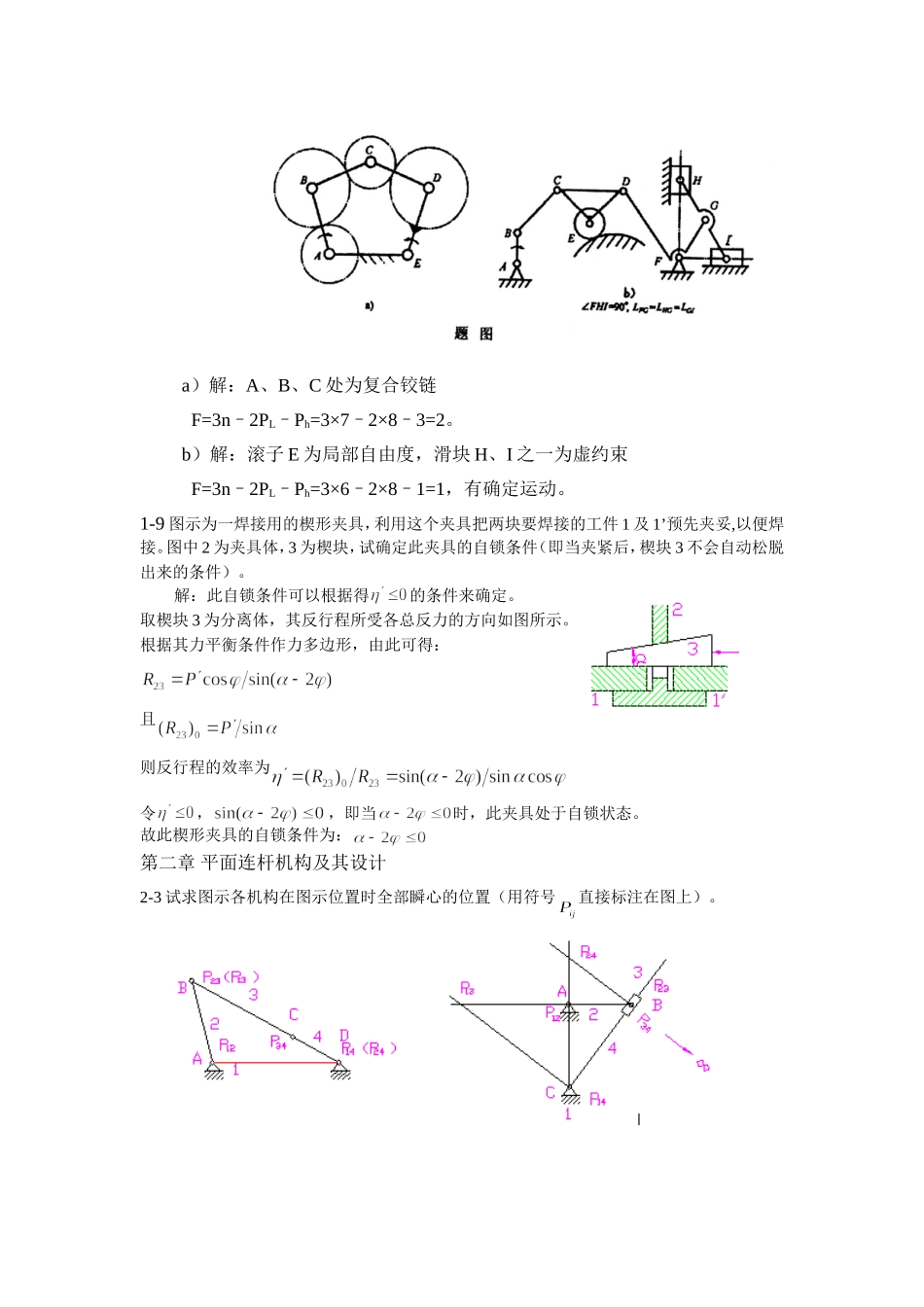
1-7计算图a与图b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并判断机构的运动是否确定,图中画有箭头的构件为原动件
a)解:A、B、C处为复合铰链F=3n–2PL–Ph=3×7–2×8–3=2
b)解:滚子E为局部自由度,滑块H、I之一为虚约束F=3n–2PL–Ph=3×6–2×8–1=1,有确定运动
1-9图示为一焊接用的楔形夹具,利用这个夹具把两块要焊接的工件1及1’预先夹妥,以便焊接
图中2为夹具体,3为楔块,试确定此夹具的自锁条件(即当夹紧后,楔块3不会自动松脱出来的条件)
解:此自锁条件可以根据得的条件来确定
取楔块3为分离体,其反行程所受各总反力的方向如图所示
根据其力平衡条件作力多边形,由此可得:且则反行程的效率为令,,即当时,此夹具处于自锁状态
故此楔形夹具的自锁条件为:第二章平面连杆机构及其设计2-3试求图示各机构在图示位置时全部