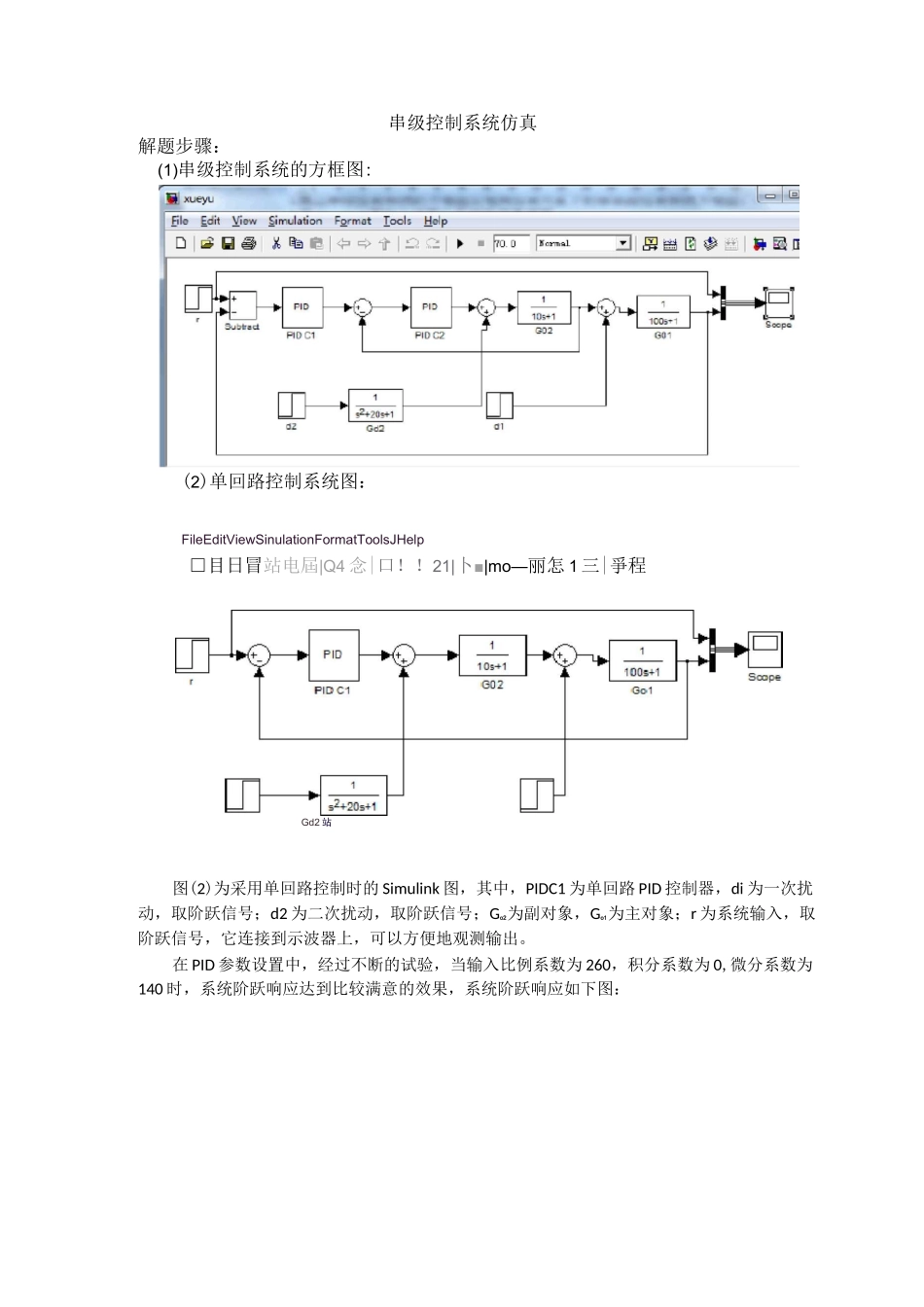
串级控制系统仿真解题步骤:(1)串级控制系统的方框图:(2)单回路控制系统图:FileEditViewSinulationFormatToolsJHelp□目日冒站电屆|Q4念|口
21|卜■|mo—丽怎1三|爭程Gd2站图(2)为采用单回路控制时的Simulink图,其中,PIDC1为单回路PID控制器,di为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;Go2为副对象,Go1为主对象;r为系统输入,取阶跃信号,它连接到示波器上,可以方便地观测输出
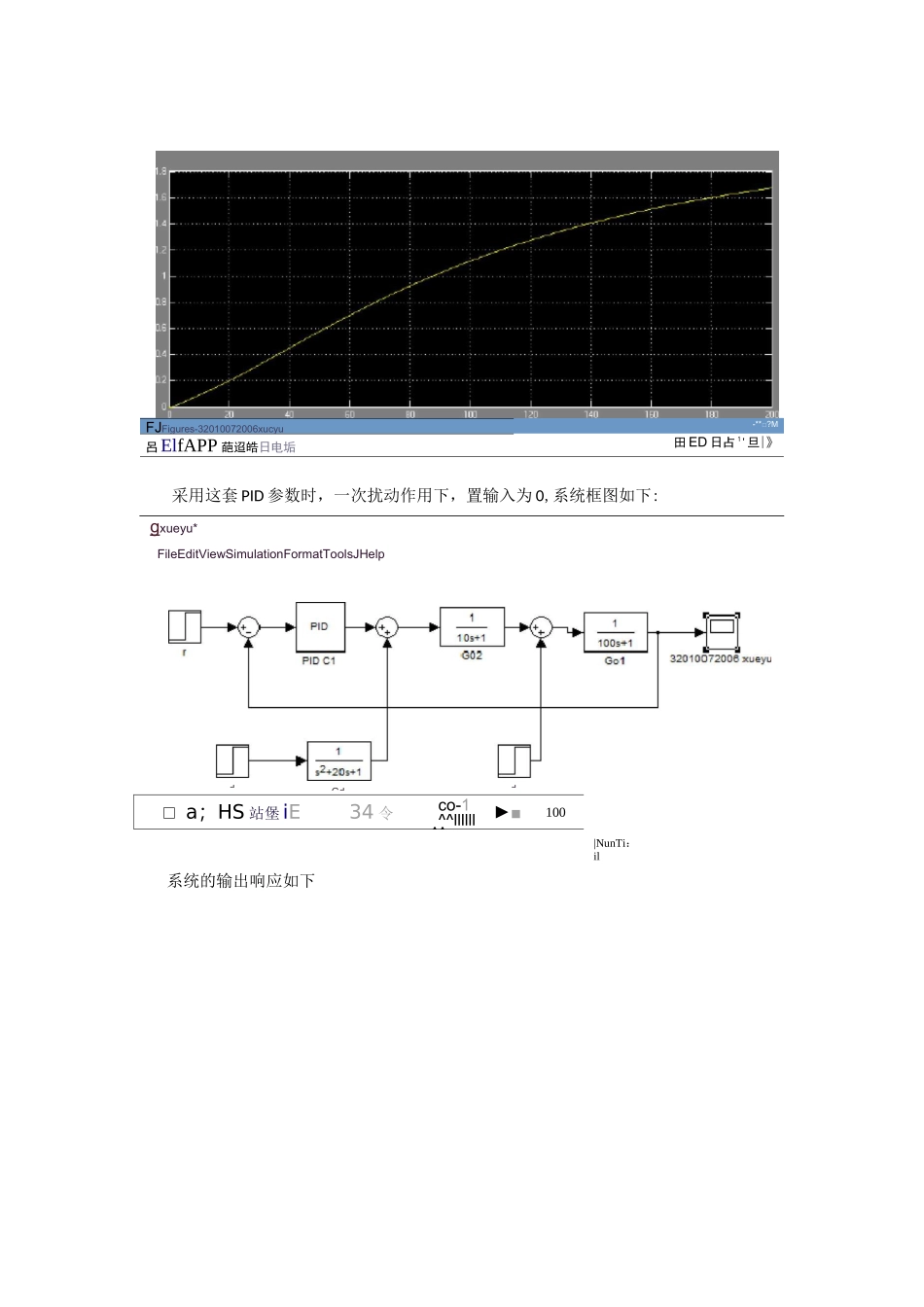
在PID参数设置中,经过不断的试验,当输入比例系数为260,积分系数为0,微分系数为140时,系统阶跃响应达到比较满意的效果,系统阶跃响应如下图:田[D日別旦”FJFigures-32010072006xucyu-**□
M呂ElfAPP葩迢皓日电垢田ED日占1'旦|》采用这套PID参数时,一次扰动作用下,置输入为0,系统框图如下:gxueyu*FileEditViewSimulationFormatToolsJHelp□a;HS站堡iE34令co-1^^llllll^^►■100系统的输出响应如下ddGd|NunTi:il系统的输出响应如下从综合以上各图可以看出,采用单回路控制,系统的阶跃响应达到要求时,系统对一次扰动,二次扰动的抑制效果不是很好
图(1)是采用串级控制时的情况,di为一次扰动,取阶跃信号;d2为二次扰动,取阶跃信号;PIDC1为主控制器,采用PD控制,PIDC2为副控制器,采用PID控制;Go2为副对象,Goi为主对象;r为系统输入,取阶跃信号;scope为系统输出,它连接到示波器上,可以方便地观测输出
经过不断试验,当PIDC1为主控制器输入比例系数为550,积分系数为0,微分系数为80时;当PIDC2为主控制器输入比例系数为3,积分系数为0,微分系数为0时;系统阶跃响应达到比较满意的效果,系统阶跃