《机电控制系统分析与设计》课程大作业之一基于 MATLAB地直流电机双闭环调速系统地设计与仿真1 计算电流和转速反馈系数2 按工程设计法,详细写出电流环地动态校正过程和设计结果根据设计地一般原则“先内环后外环 ”,从内环开始,逐步向外扩展
在这里,首先设计电流调节器,然后把整个电流环看作是转速调节系统中地一个环节,再设计转速调节器
电流调节器设计分为以下几个步骤:a 电流环结构图地简化1) 忽略反电动势地动态影响在按动态性能设计电流环时,可以暂不考虑反电动势变化地动态影响,即DE≈0
这时,电流环如下图所示
2) 等效成单位负反馈系统如果把给定滤波和反馈滤波两个环节都等效地移到环内,同时把给定信号改成U*i(s) /b ,则电流环便等效成单位负反馈系统
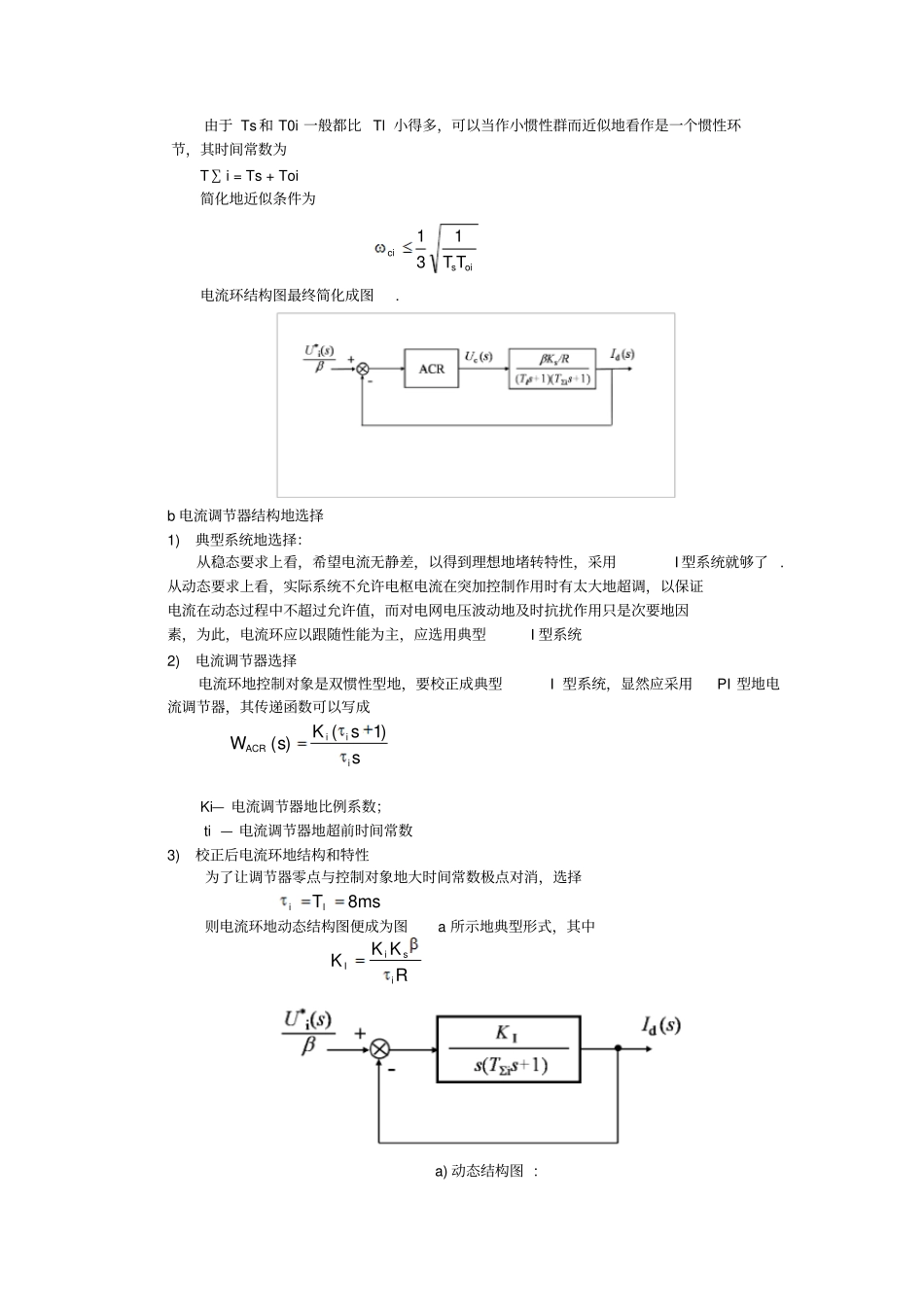
3) 小惯性环节近似处理由于 Ts 和 T0i 一般都比 Tl 小得多,可以当作小惯性群而近似地看作是一个惯性环节,其时间常数为T∑ i = Ts + Toi简化地近似条件为电流环结构图最终简化成图
b 电流调节器结构地选择1)典型系统地选择:从稳态要求上看,希望电流无静差,以得到理想地堵转特性,采用I 型系统就够了
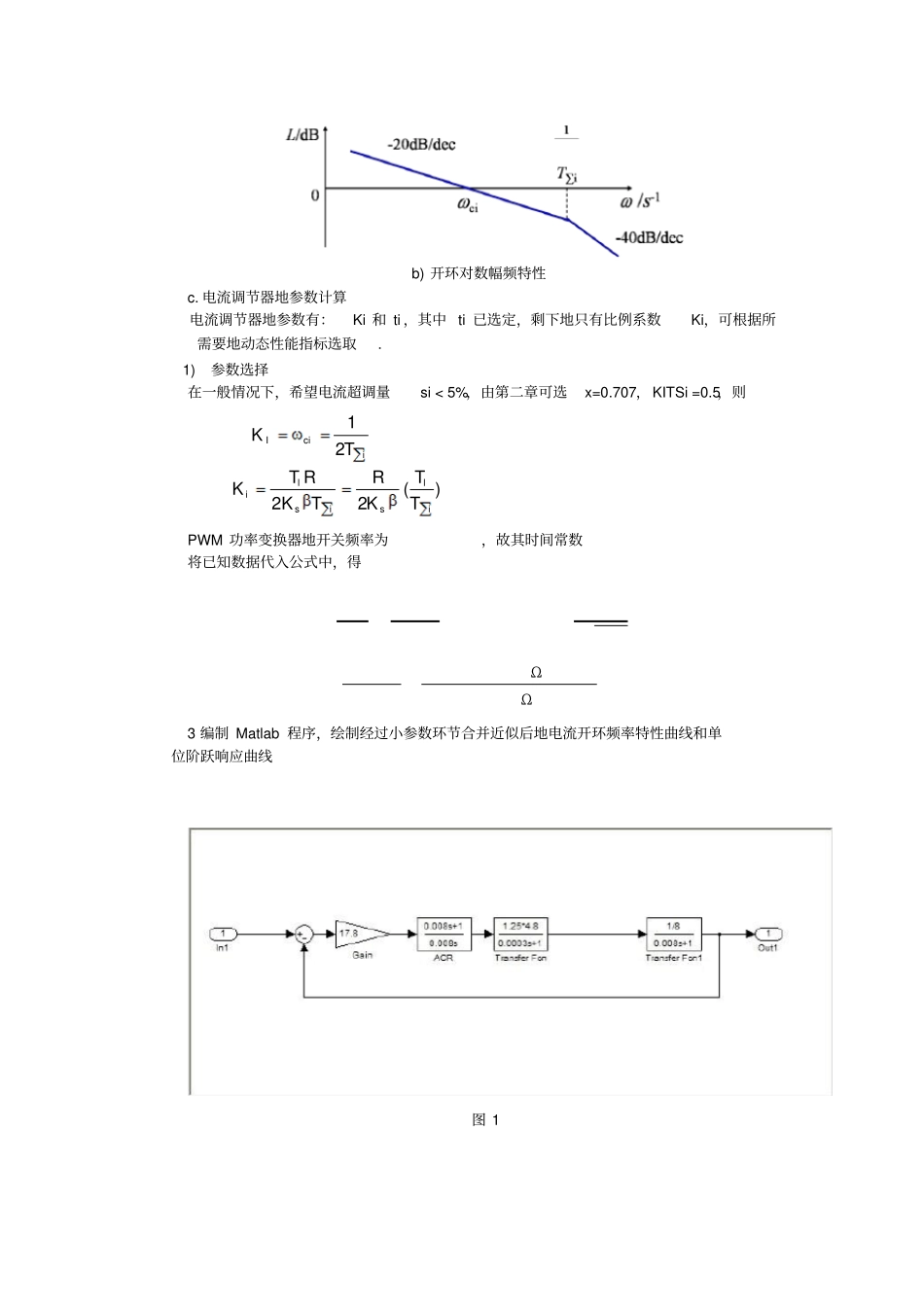
从动态要求上看,实际系统不允许电枢电流在突加控制作用时有太大地超调,以保证电流在动态过程中不超过允许值,而对电网电压波动地及时抗扰作用只是次要地因素,为此,电流环应以跟随性能为主,应选用典型I 型系统2)电流调节器选择电流环地控制对象是双惯性型地,要校正成典型I 型系统,显然应采用PI 型地电流调节器,其传递函数可以写成Ki— 电流调节器地比例系数;ti — 电流调节器地超前时间常数3)校正后电流环地结构和特性为了让调节器零点与控制对象地大时间常数极点对消,选择则电流环地动态结构图便成为图a 所示地典型形式,其中a) 动态结构图 : oisci131TTssKsWiiiACR)1()(msTl8iRKK