本科生课程设计题目: 基于双闭环PID 控制的一阶倒立摆控制系统设计姓名:学号:系别:电气工程系专业:电气工程与自动化年级: 07级指导教师: 2010 年4 月28 日目录1、系统模型的建立 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3
2、模型验证 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯
3、设计的内外环的 PID 控制器 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯10
4、SIMULIN仿真⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯
5、检测系统的鲁棒性 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯16
6、遇到问题 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯19
7、心得体会 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯
8、结论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯
⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯ 21
9、参考文献 ⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯
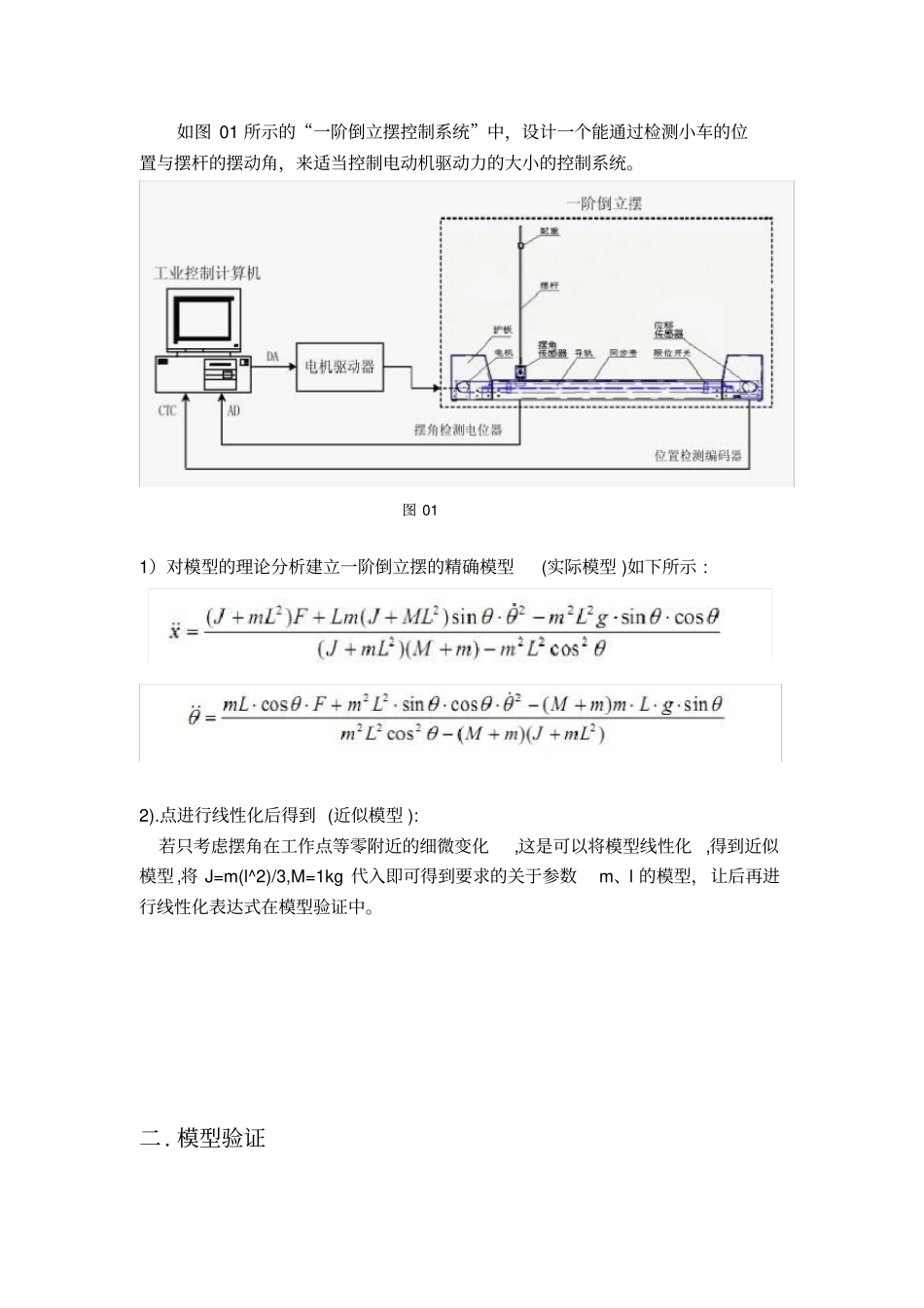
系统模型的建立如图 01 所示的“一阶倒立摆控制系统”中,设计一个能通过检测小车的位置与摆杆的摆动角,来适当控制电动机驱动力的大小的控制系统
图 01 1)对模型的理论分析建立一阶倒立摆的精确模型(实际模型 )如下所示 : 2)
点进行线性化后得到 (近似模型 ): 若只考虑摆角在工作点等零附近的细微变化,这是可以将模型线性化 ,得到近似模型 ,将 J=m(l^2)/3,M=1kg 代入即可得到要求的关于参数m、l 的模型,让后再进行线性化表达式在模型验证中
模型验证1)子系统的建立实际模型图 1 Fcn:(((4*m*(l^2))/3)*u[1]+l*m*((4*m*(l^2))/3)*sin(u[3])*(u[2]^2)-10*(m^2)*(l^2)*sin(u[3])*cos(u[3]))/(((4*m*(l^2))/3)*(1+m)-(m^2)*(l^2)*power(co