动态规划的技巧——阶段的划分和状态的表示在动态规划的设计过程中,阶段的划分和状态的表示是非常重要的两步,这两步会直接影响该问题的计算复杂性,有时候阶段划分或状态表示的不合理还会使得动态规划法不适用
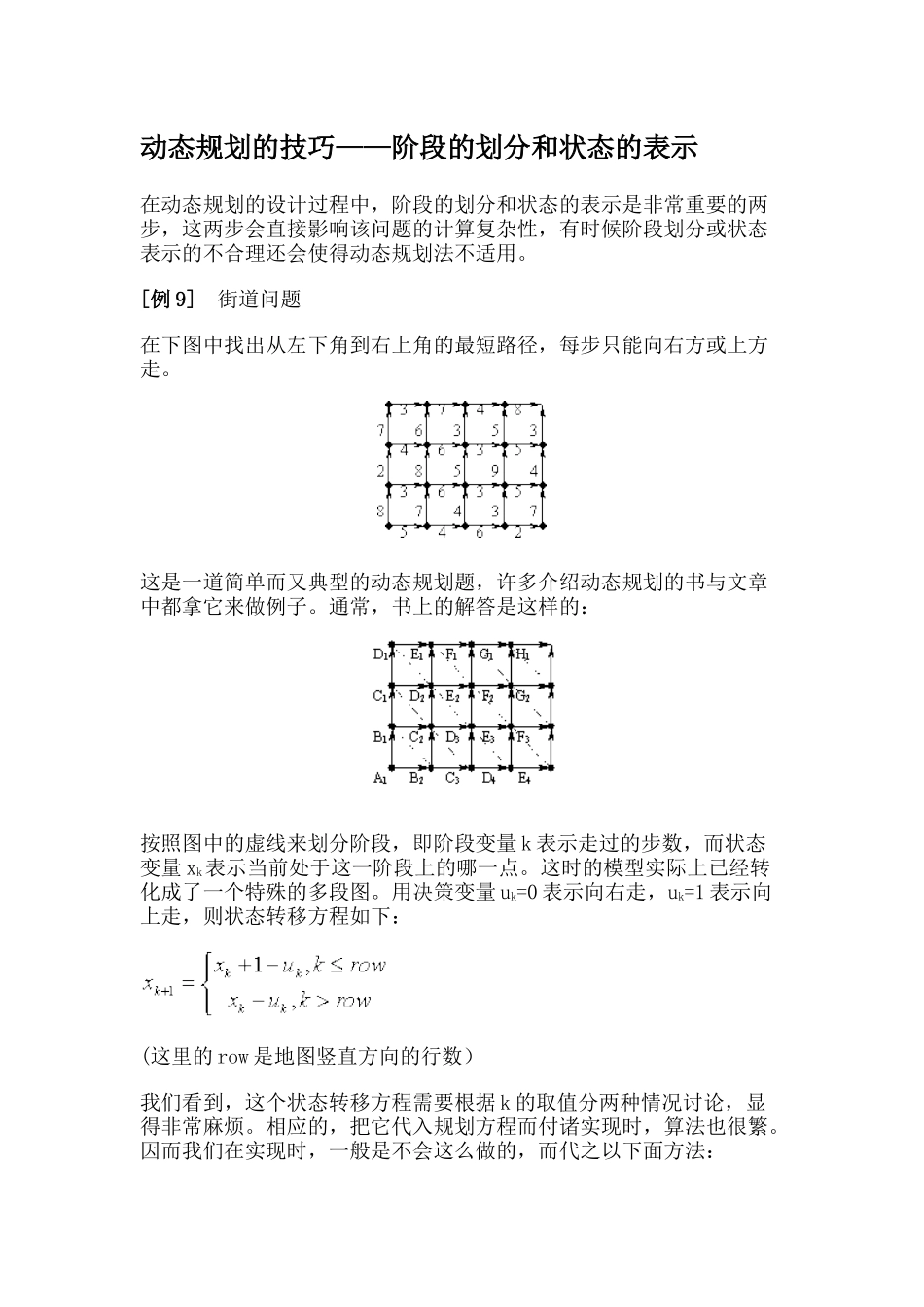
[例9]街道问题在下图中找出从左下角到右上角的最短路径,每步只能向右方或上方走
这是一道简单而又典型的动态规划题,许多介绍动态规划的书与文章中都拿它来做例子
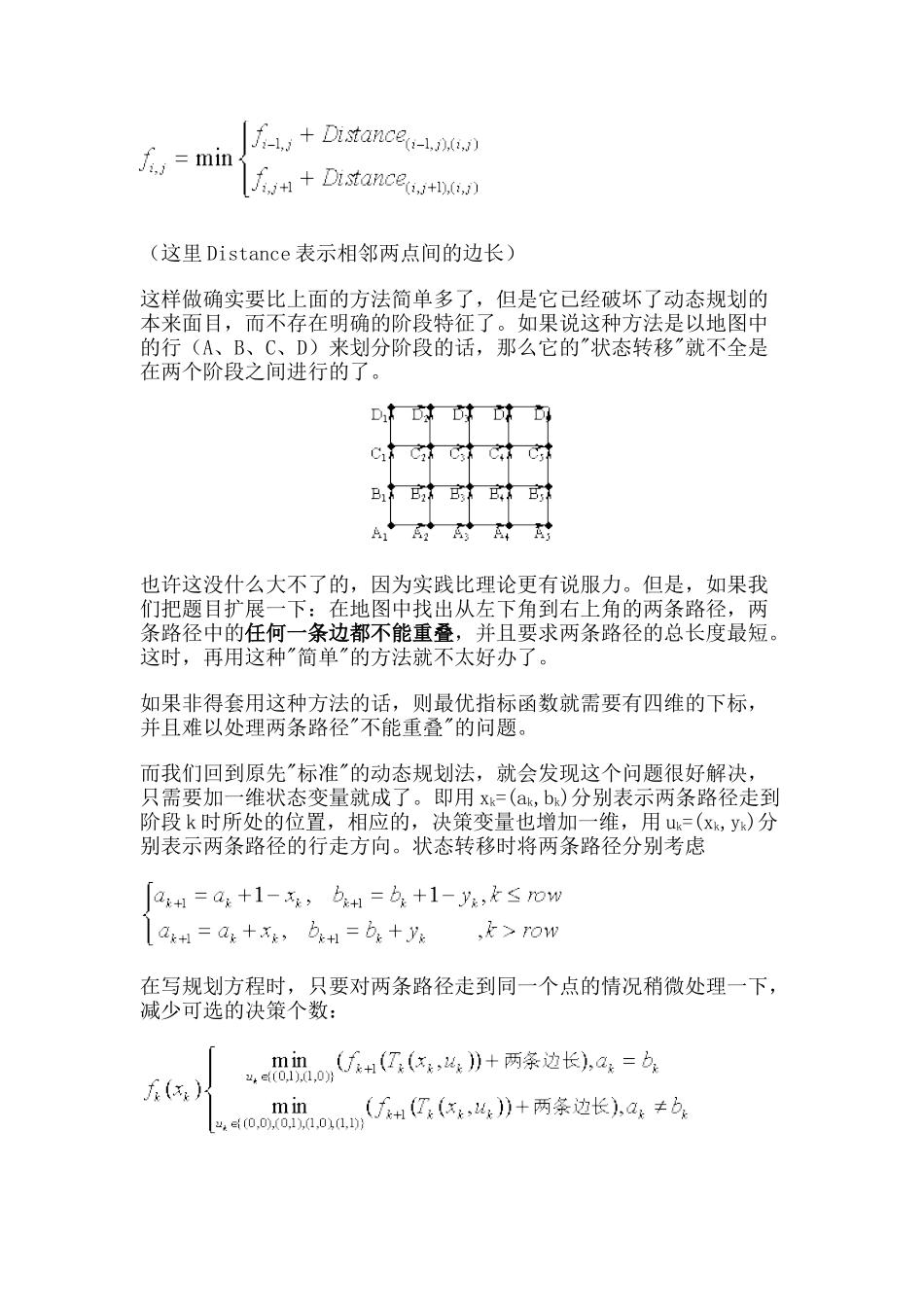
通常,书上的解答是这样的:按照图中的虚线来划分阶段,即阶段变量k表示走过的步数,而状态变量xk表示当前处于这一阶段上的哪一点
这时的模型实际上已经转化成了一个特殊的多段图
用决策变量uk=0表示向右走,uk=1表示向上走,则状态转移方程如下:(这里的row是地图竖直方向的行数)我们看到,这个状态转移方程需要根据k的取值分两种情况讨论,显得非常麻烦
相应的,把它代入规划方程而付诸实现时,算法也很繁
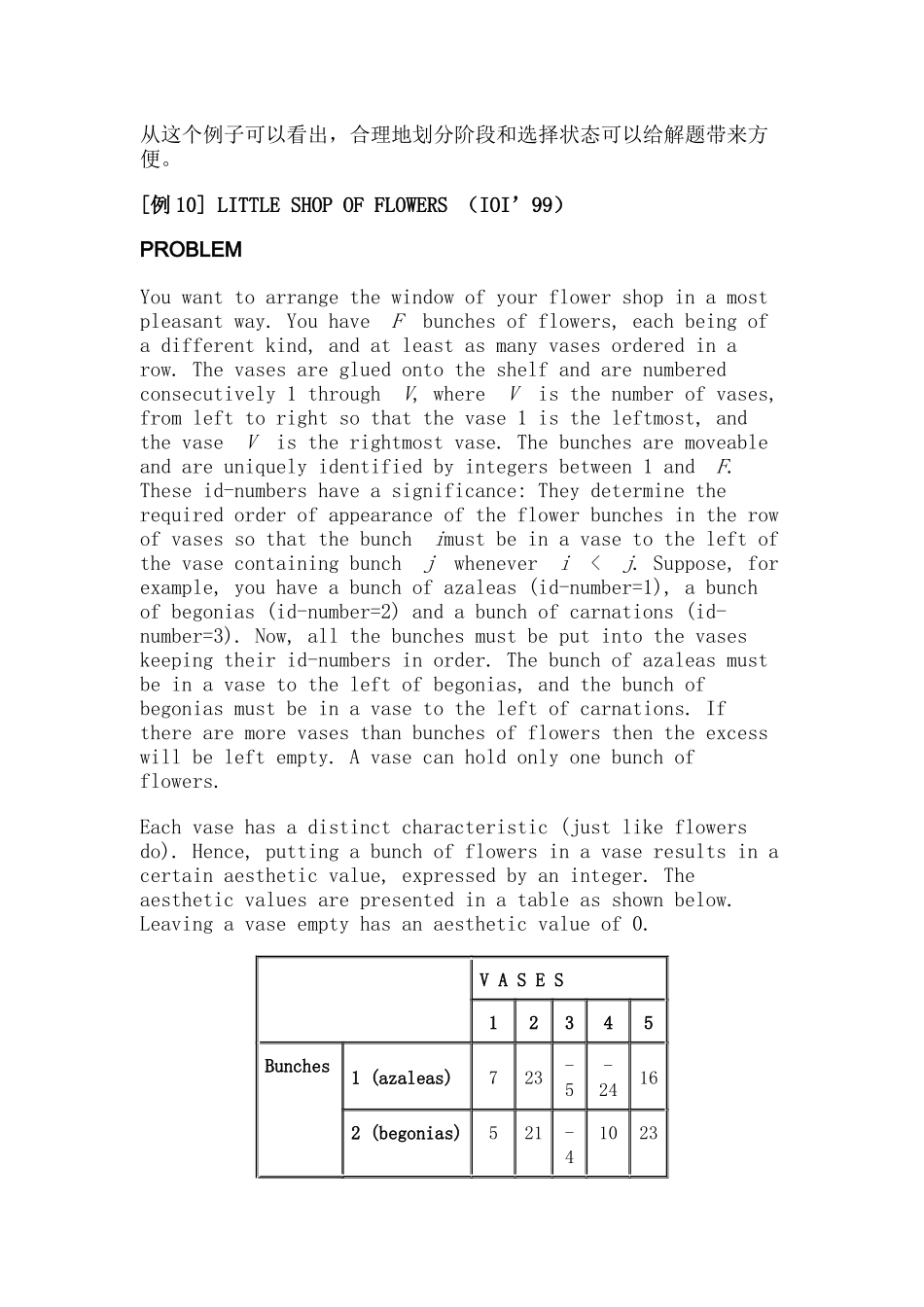
因而我们在实现时,一般是不会这么做的,而代之以下面方法:(这里Distance表示相邻两点间的边长)这样做确实要比上面的方法简单多了,但是它已经破坏了动态规划的本来面目,而不存在明确的阶段特征了
如果说这种方法是以地图中的行(A、B、C、D)来划分阶段的话,那么它的"状态转移"就不全是在两个阶段之间进行的了
也许这没什么大不了的,因为实践比理论更有说服力
但是,如果我们把题目扩展一下:在地图中找出从左下角到右上角的两条路径,两条路径中的任何一条边都不能重叠,并且要求两条路径的总长度最短
这时,再用这种"简单"的方法就不太好办了
如果非得套用这种方法的话,则最优指标函数就需要有四维的下标,并且难以处理两条路径"不能重叠"的问题
而我们回到原先"标准"的动态规划法,就会发现这个问题很好解决,只需要加一维状态变量就成了
即用xk=(ak,bk)分别表示两条路径走到阶段k时所处的位置,相应的,决策变量也增加一维,用uk=(xk,yk)分别表