第十八章 机械系统的动力学分析 《机械设计基础》教案(机电专业 6 0 学时) 3 2 6 第十八章 机械系统的动力学分析 1.教学目标 1、掌握机械产生周期性速度波动的原因及调节; 2、理解飞轮调速的基本原理; 3、掌握回转构件的动平衡和静平衡原理 2.教学重点和难点 【重点、难点】 掌握周期性速度波动的原因及调节;飞轮调速的基本原理;回转构件的动平衡和静平衡原理 3.讲授方法:多媒体和演示柜教学 正 文 §18
1 机械系统速度波动及调节 我们在前面对机构进行研究时,都是假定运动件的运动规律已知,并且假定原动件作等速运动
实际上,机构原动件的运动规律是由各构件的质量、转动惯量和作用在机械上的力等因素共同决定的
在一般情况下,原动件的运动参数(位移、速度、加速度)往往是随时间而变化的,这时我们需要将机器作为一个整体来进行研究的
所以,研究在外力作用下机械的真实运动规律,对于设计机械,尤其是对于高速、重载、高自动化的机械是十分重要的
同时,机械运动过程中出现的速度波动,也会导致运动副中产生附加动载荷、,引起机械的振动,从而会降低机械的寿命、效率和工作质量
所以,这就需要我们对机械的运转速度波动及调节方法进行研究
为了研究这两个问题,我们必须首先了解机械运转过程中三个阶段的运动状态
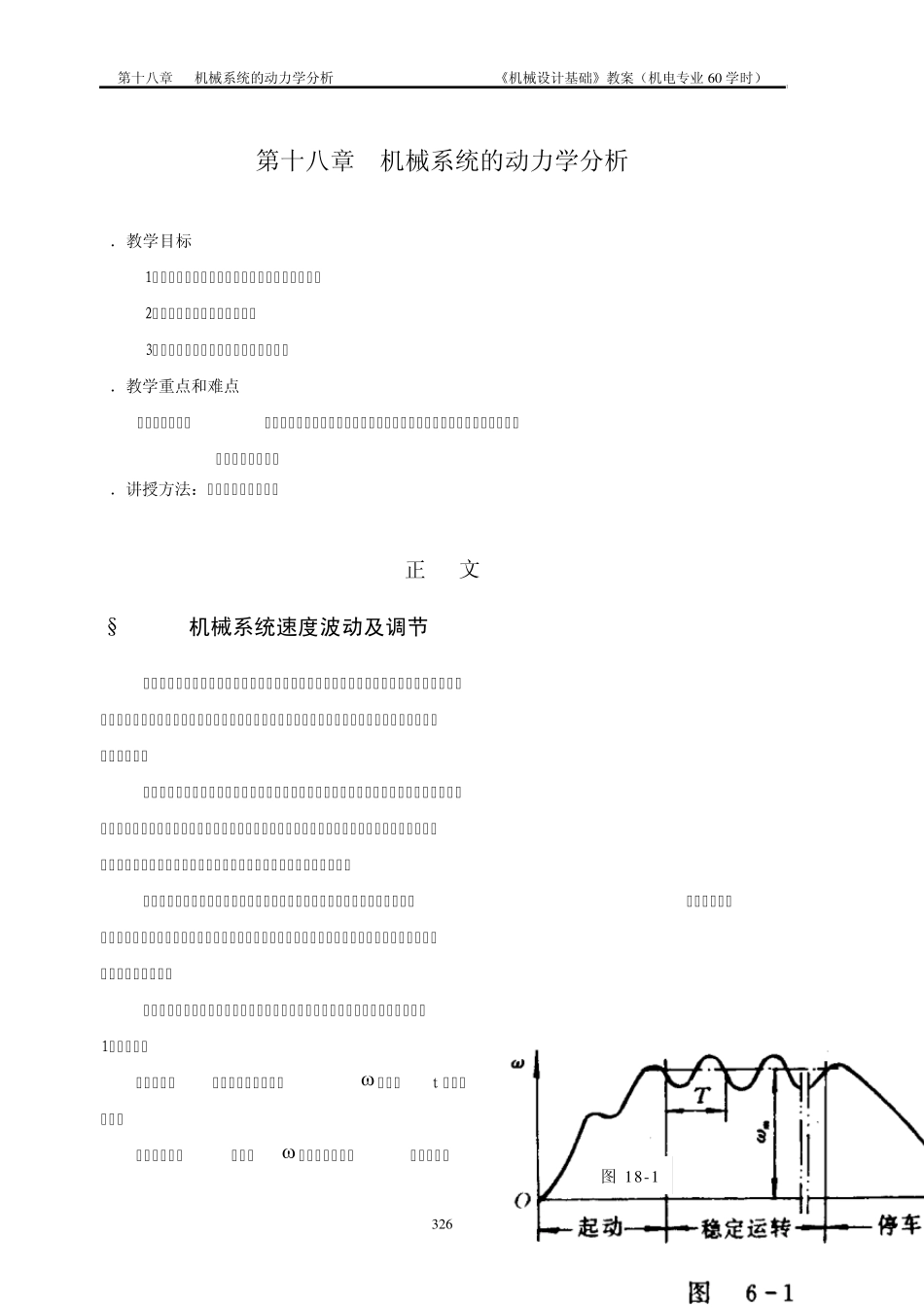
1.起动阶段 如图所示,机械原动件的角速度 随时间t 变化的曲线
在起动阶段,原动件 由零逐渐上升,直至达到正图 1 8 -1 第十八章 机械系统的动力学分析 《机械设计基础》教案(机电专业 60 学时) 327 常的运转平均角速度m为止
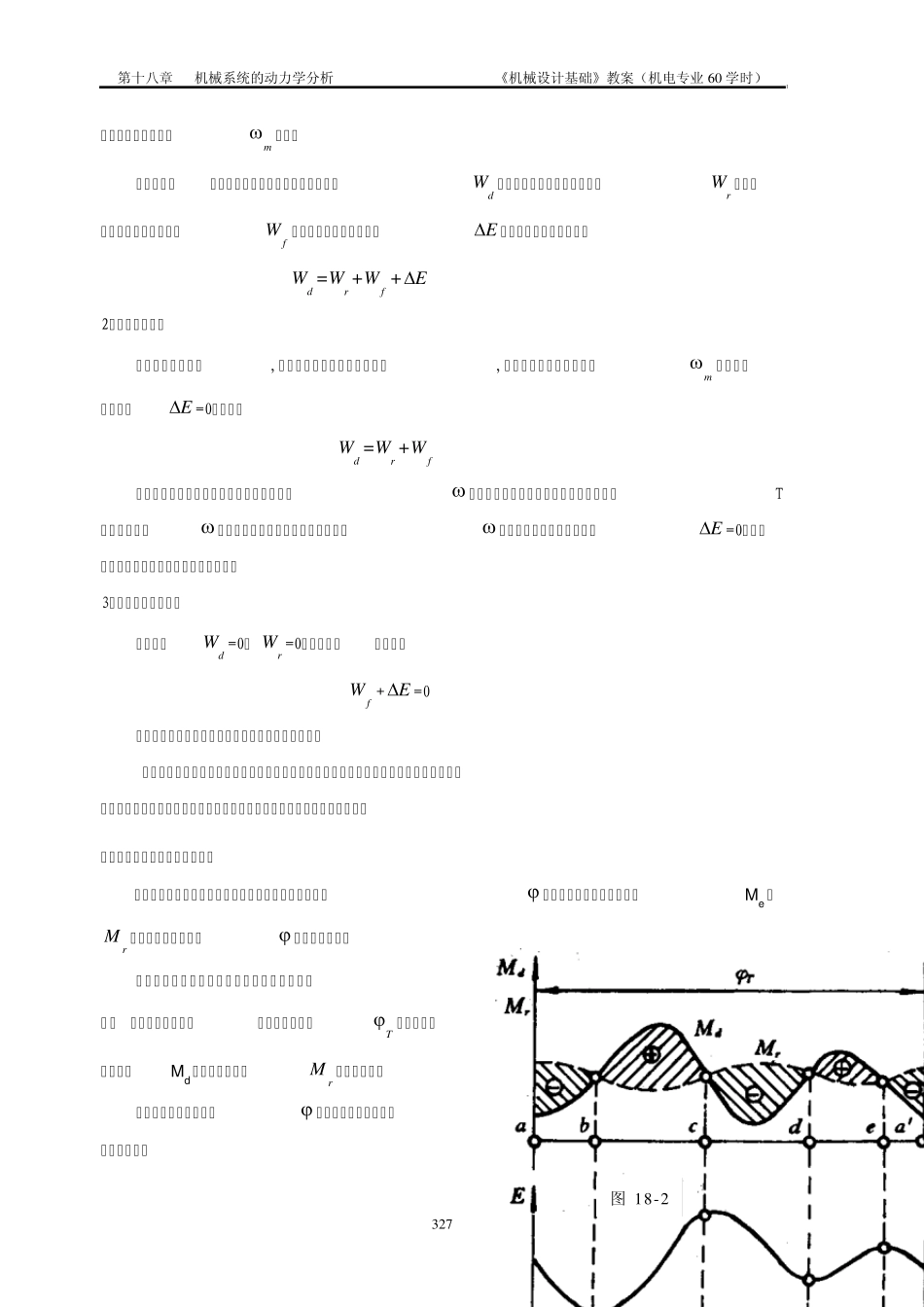
这一阶段,由于机械所受的驱动力所作的驱动功dW 大于为克服生产阻力所需的功rW 和克服有害阻力消耗的损耗功fW ,所以系统内积蓄了动能E
该阶段的功能关系为: dW =rW +fW + E 2.稳定运行阶段 起动阶段完成之后,机械进入稳定运