实验二 数字PID 控制 计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量
因此连续PID 控制算法不能直接使用,需要采用离散化方法
在计算机PID 控制中,使用的是数字PID 控制器
一、位置式 PID 控制算法 按模拟 PID 控制算法,以一系列的采样时刻点 kT 代表连续时间 t,以矩形法数值积分近似代替积分,以一阶后向差分近似代替微分,可得离散PID 位置式表达式: kjdipkjDIpTkekekTjekkekkekeTTjeTTkekku00)1()()()())1()(()()()( 式中,DpdIpiTkkTkk,,e 为误差信号(即 PID 控制器的输入),u 为控制信号(即控制器的输出)
在仿真过程中,可根据实际情况,对控制器的输出进行限幅
二、连续系统的数字PID 控制仿真 连续系统的数字PID 控制可实现 D/A 及 A/D 的功能,符合数字实时控制的真实情况,计算机及 DSP 的实时PID 控制都属于这种情况
1.Ex3 设被控对象为一个电机模型传递函数BsJssG21)(,式中J=0
0067,B=0
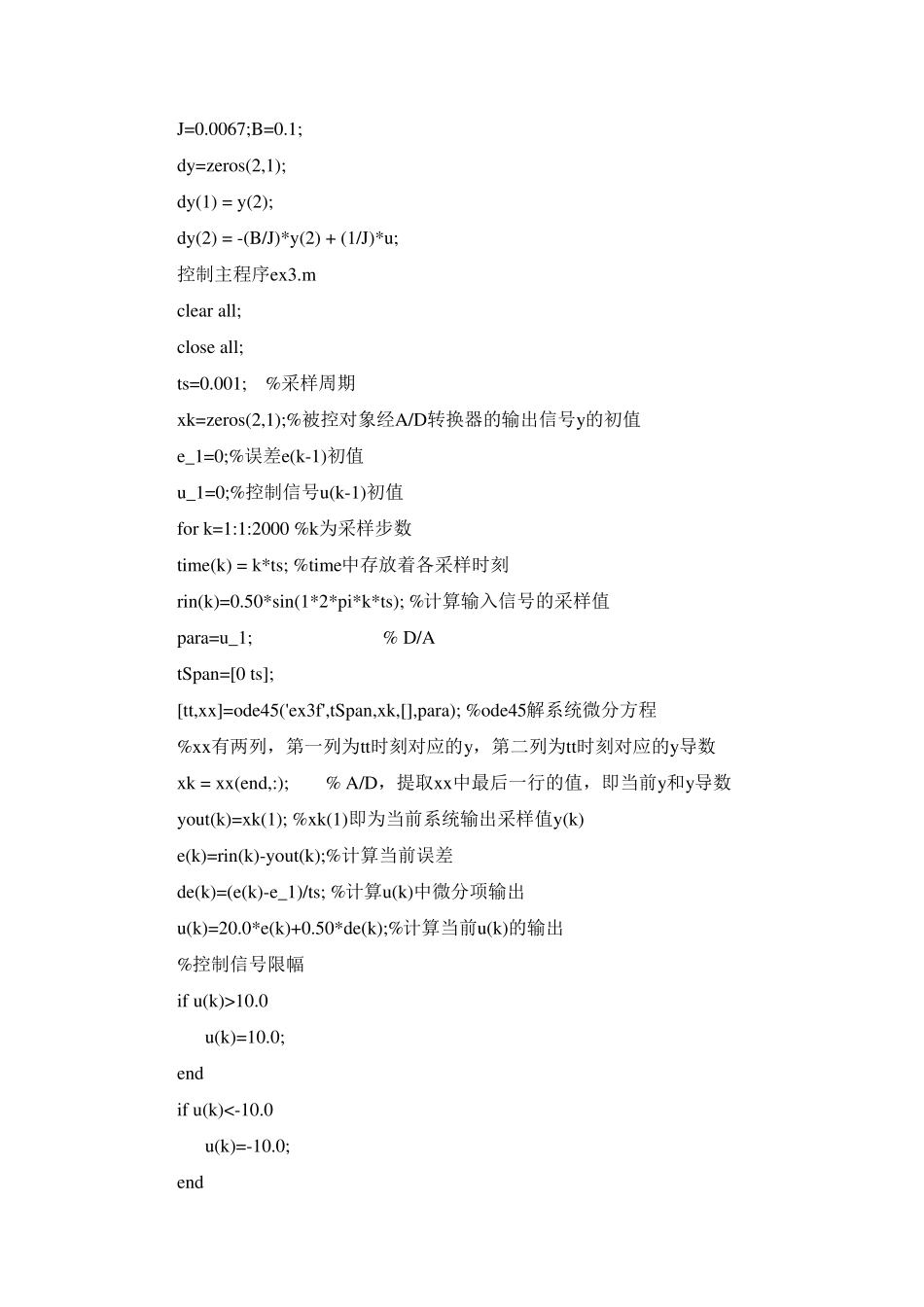
输入信号为)2sin(5
0t ,采用PD 控制,其中5
0,20dpkk
采用ODE45 方法求解连续被控对象方程
因为BsJssUsYsG21)()()(,所以udtdyBdtydJ22,另yyyy2,1,则/J)*u((B/J)yyyy12221,因此连续对象微分方程函数ex 3f
m 如下 fu nction dy = ex 3f(t,y ,flag,para) u =para; J=0
0067;B=0
1; dy=zeros(2,1); dy(1) = y(2); dy(2) = -(B/J)*y(2) + (1/