1 实验一 基于PLC 控制方式的三相异步电动机点动和自锁控制
2 实验二 基于PLC 控制方式的三相异步电动机延时正反转控制
4 实验三 基于PLC 控制方式的三相异步电动机联锁正反转控制
6 实验四 基于PLC 的异步电动机Y/△起动控制
8 实验四 基于PLC 的异步电动机Y/△起动控制
8 实验五 PLC 控制的三相鼠笼式异步电动机单向反接制动线路
10 2 实验一 基于PLC 控制方式的三相异步电动机点动和自锁控制 一.实验目的 1.通过对三相鼠笼式异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识
2.通过实验进一步加深理解点动控制和自锁控制的特点
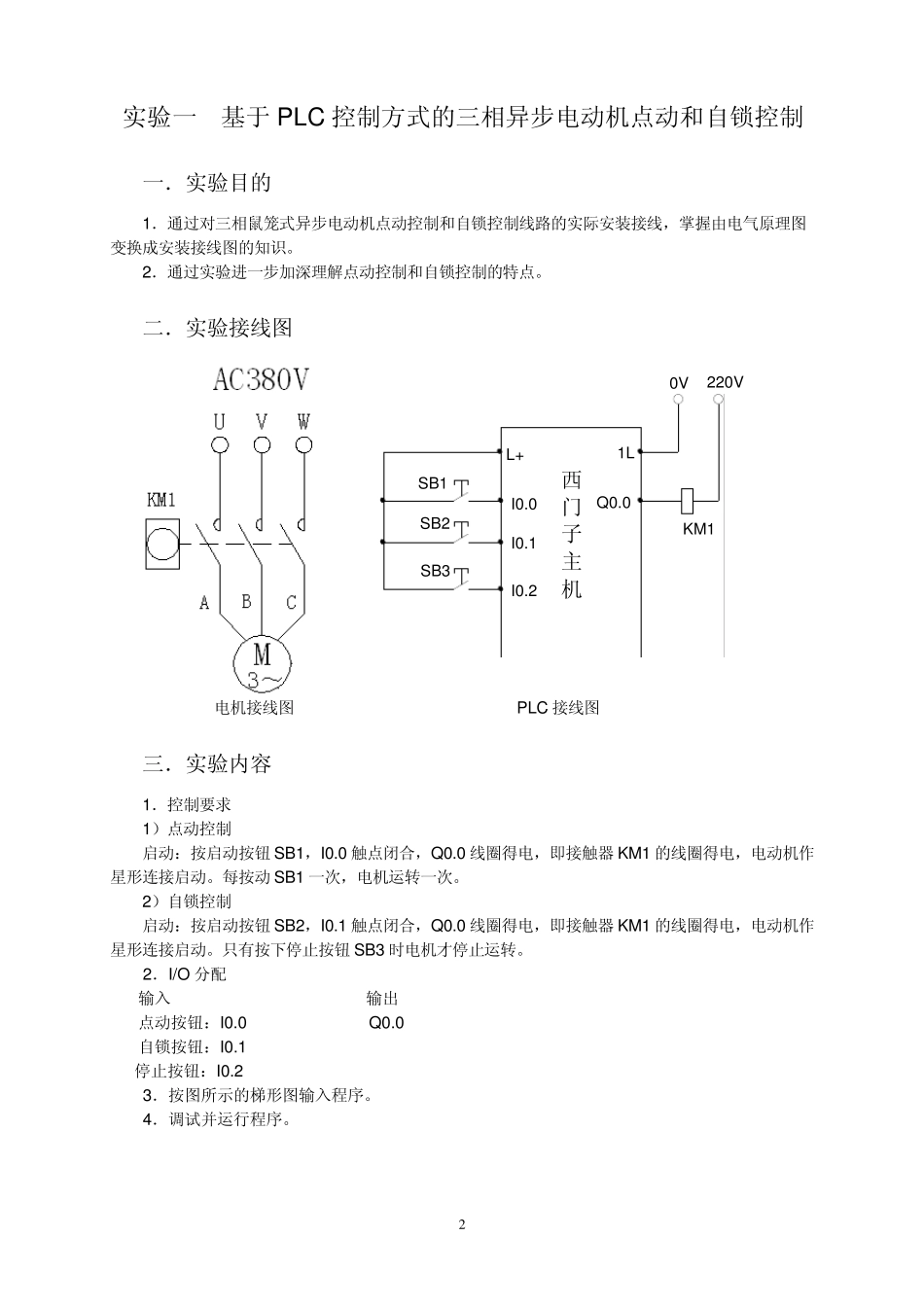
二.实验接线图 西门子主机220V0V1LQ0
0SB3SB2SB1L+KM1 电机接线图 PLC 接线图 三.实验内容 1.控制要求 1)点动控制 启动:按启动按钮 SB1,I0
0 触点闭合,Q0