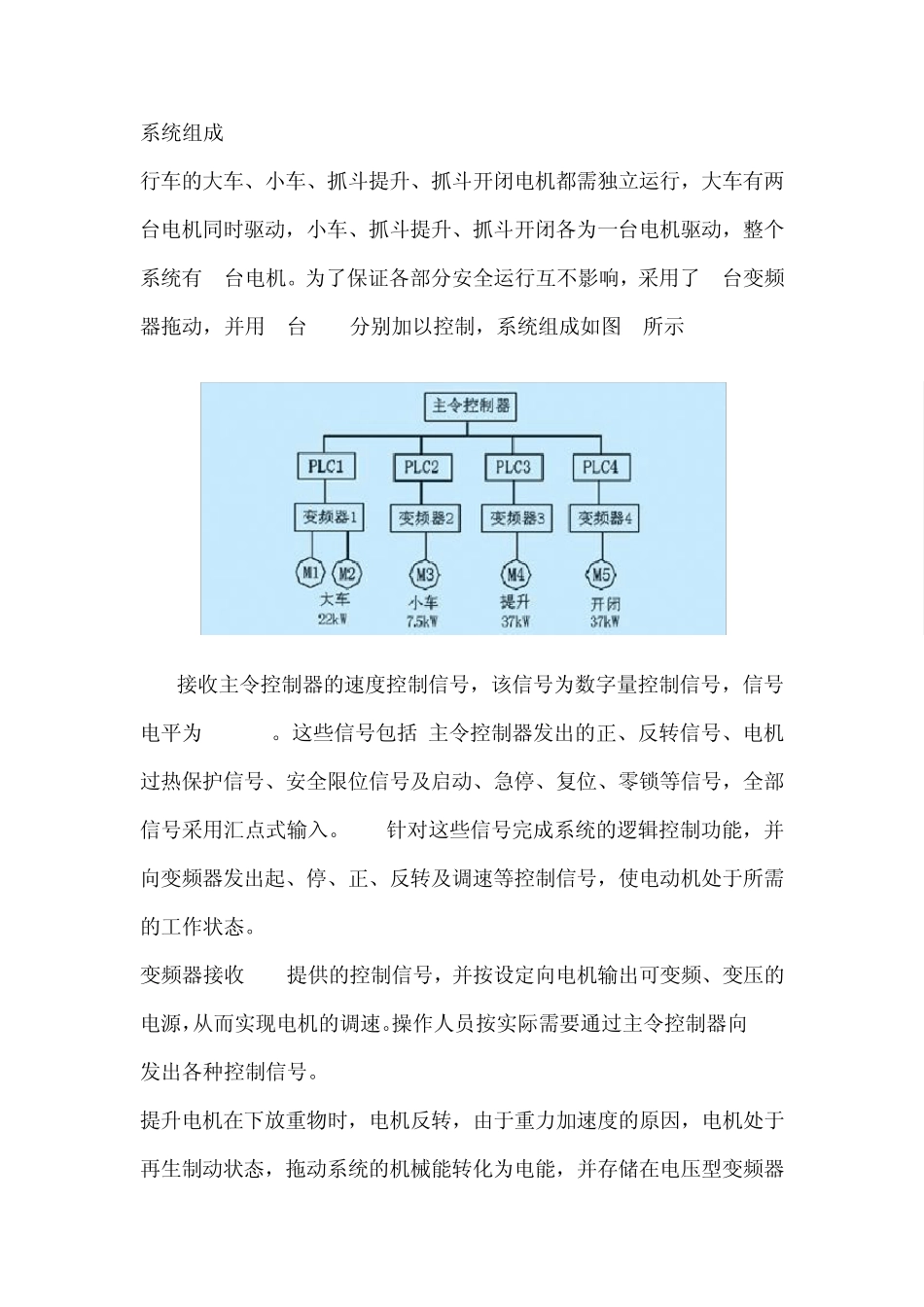
系统组成 行车的大车、小车、抓斗提升、抓斗开闭电机都需独立运行,大车有两台电机同时驱动,小车、抓斗提升、抓斗开闭各为一台电机驱动,整个系统有 5台电机
为了保证各部分安全运行互不影响,采用了 4台变频器拖动,并用 4台 PLC分别加以控制,系统组成如图 1所示: PLC接收主令控制器的速度控制信号,该信号为数字量控制信号,信号电平为 AC220V
这些信号包括:主令控制器发出的正、反转信号、电机过热保护信号、安全限位信号及启动、急停、复位、零锁等信号,全部信号采用汇点式输入
PLC针对这些信号完成系统的逻辑控制功能,并向变频器发出起、停、正、反转及调速等控制信号,使电动机处于所需的工作状态
变频器接收 PLC提供的控制信号,并按设定向电机输出可变频、变压的电源,从而实现电机的调速
操作人员按实际需要通过主令控制器向 PLC发出各种控制信号
提升电机在下放重物时,电机反转,由于重力加速度的原因,电机处于再生制动状态,拖动系统的机械能转化为电能,并存储在电压型变频器的滤波电容器的两端,使直流电压不断上升,甚至能够击穿电器绝缘,当电压上升到设定值时,接入泄能电阻来消耗直流电路的这部分能量,保证变频器安全运行
变频器与 PLC通信 系统采用现场总线方式代替传统的模拟量或开关量方式控制变频器
系统中,小车及提升变频器通过选件模块连接至 Profibus-DP总线上,综合考虑数据传输的实时性及稳定性,系统选用PPC-3作为数据传输格式,波特率选择 387
采用总线结构后,系统进一步优化,具体表现如下: (1) 布线简单 只需 1根两芯的屏蔽双绞线,而采用别的方式至少要4根电缆,从而减少了维护工作
(2) 给定稳定 避免了因信号的漂移、电磁干扰等诸多因素而引起模拟量给定抖动,因此系统速度给定更加可靠
(3) 速度连续 相对于采用开关量作为速度给定的系统,速度给定由离