0、引 言 对单片机、工控机进行位置控制来说,采用可靠性高,程序编辑、修改和调试便捷的可编程逻辑控制器(PLC)以及定位模块集成进行位置控制,无须花太多的精力放在硬件处理上,采用积木式结构便可很快形成控制系统
定位模块 FX2N-1PG 是三菱 PLC 功能模块之一 ,可单轴控制,脉冲输出最大可达100 KB/s
针对定位控制的特点,该模块具有完善的控制参数设定,如定位目标跟踪、运行速度、爬行速度、加减速时间等
这些参数都可通过 PLC 的 FROM/TO 指令设定
除高速响应输出外,还有常用的输入控制,如正反限位开关、STOP、DOG(回参考点开关信号)、PG0(参考点信号)等
此外,还内置了许多软控制位,如返回原点、向前、向后等
对这些特定的功能,只要通过设置特定的缓冲单元已定义的位就可实现
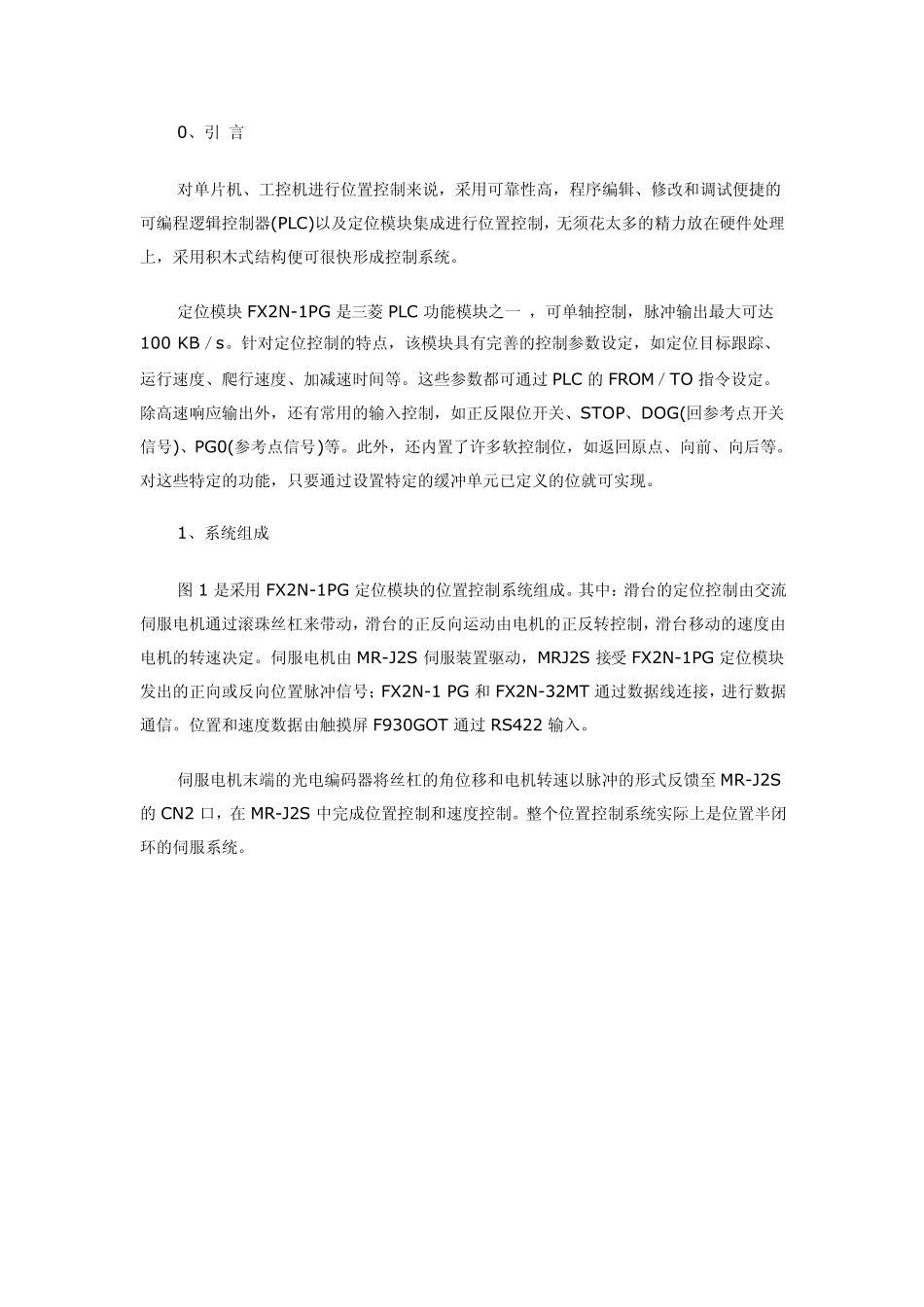
1、系统组成 图 1 是采用 FX2N-1PG 定位模块的位置控制系统组成
其中:滑台的定位控制由交流伺服电机通过滚珠丝杠来带动,滑台的正反向运动由电机的正反转控制,滑台移动的速度由电机的转速决定
伺服电机由 MR-J2S 伺服装置驱动,MRJ2S 接受 FX2N-1PG 定位模块发出的正向或反向位置脉冲信号;FX2N-1 PG 和 FX2N-32MT 通过数据线连接,进行数据通信
位置和速度数据由触摸屏 F930GOT 通过 RS422 输入
伺服电机末端的光电编码器将丝杠的角位移和电机转速以脉冲的形式反馈至 MR-J2S的 CN2 口,在 MR-J2S 中完成位置控制和速度控制
整个位置控制系统实际上是位置半闭环的伺服系统
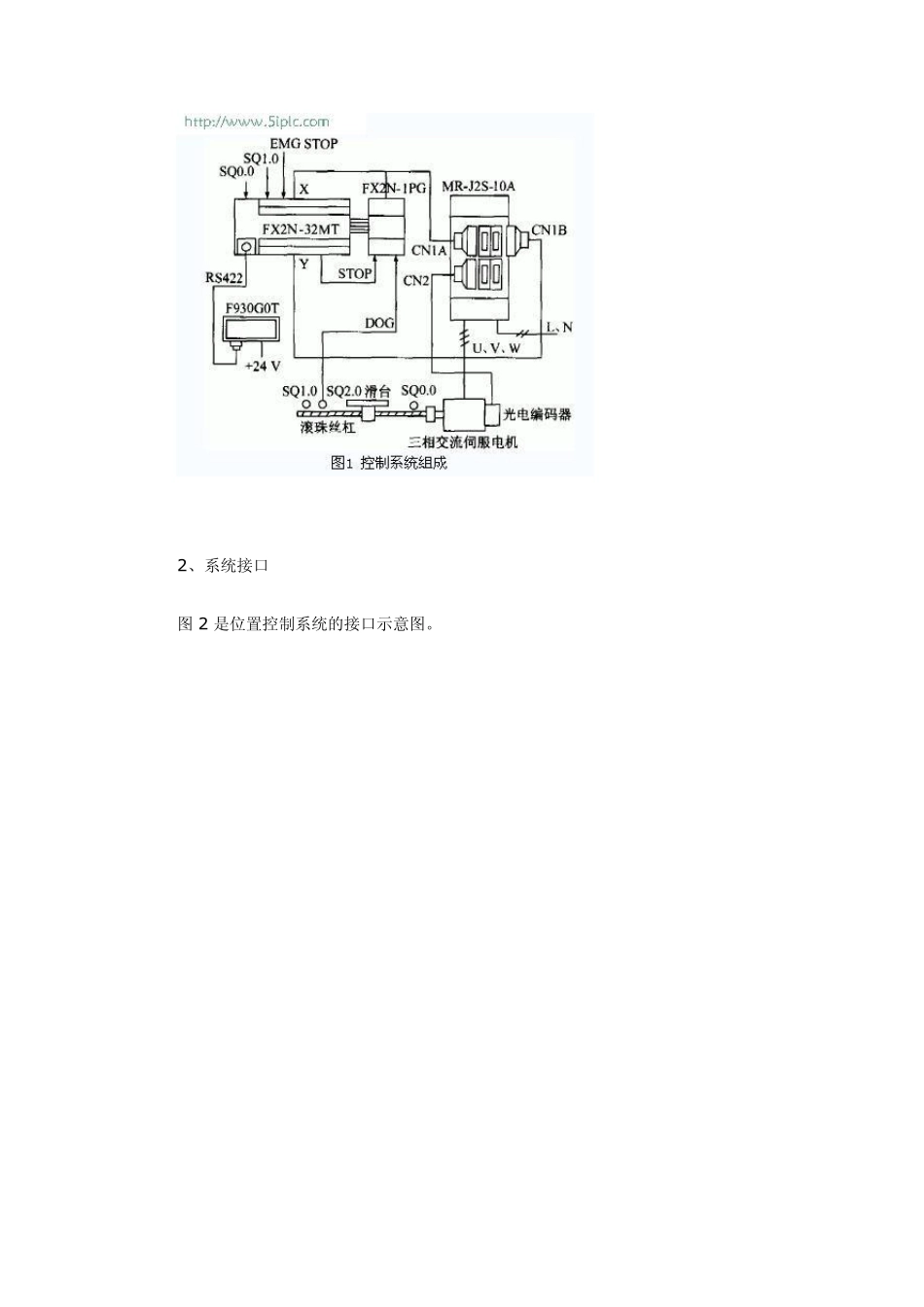
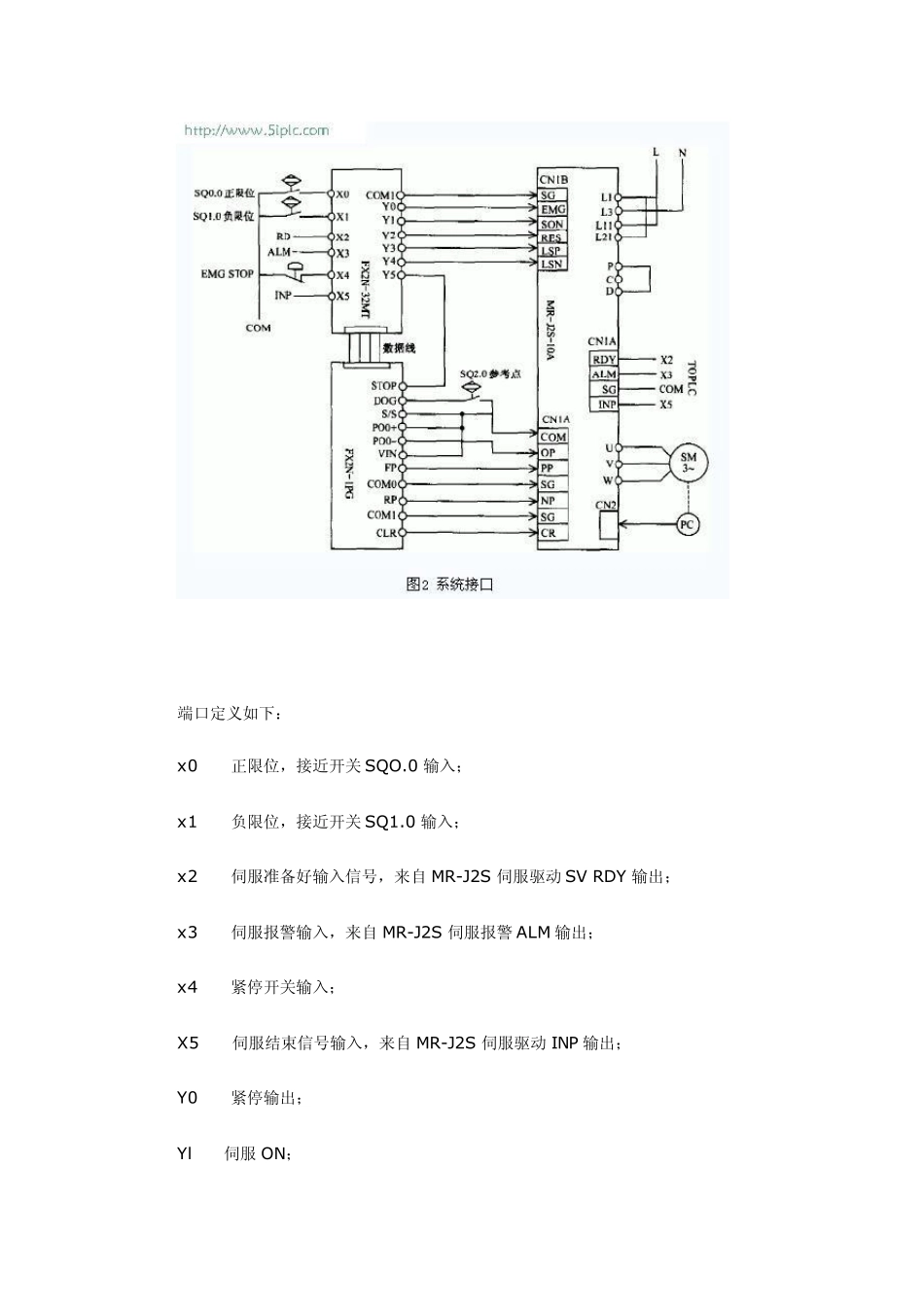
2 、系统接口 图 2 是位置控制系统的接口示意图
端口定义如下: x 0——正限位,接近开关 SQO
0 输入; x 1——负限位,接近开关 SQ1
0 输入; x 2——伺服准备好输入信号,来自 MR-J2S 伺服驱动 SV RDY 输出; x