S7-1200 伺 服 指 令 运 动 指 令 详 解 及 示 例 1
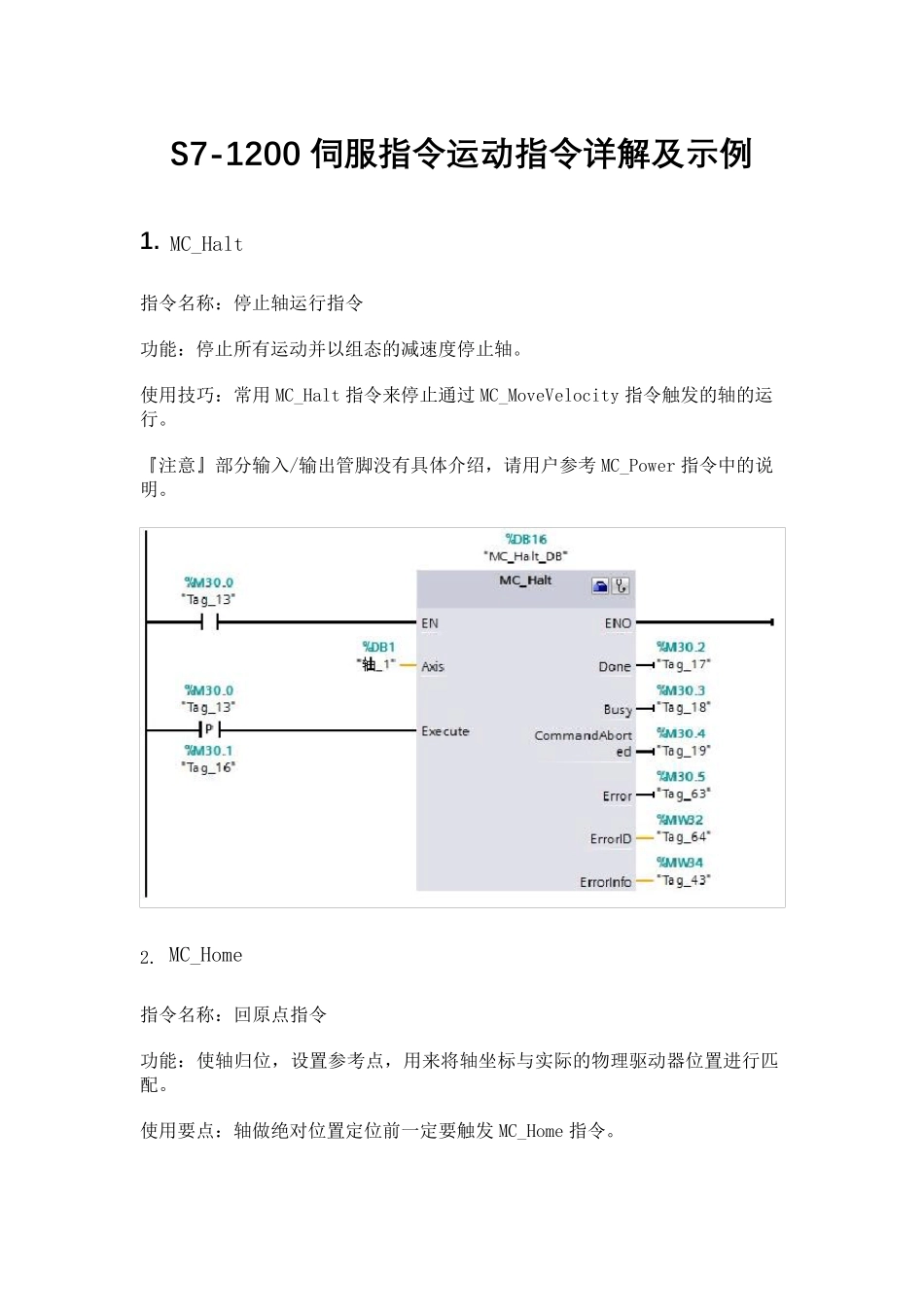
MC_Halt 指令名称:停止轴运行指令 功能:停止所有运动并以组态的减速度停止轴
使用技巧:常用 MC_Halt 指令来停止通过 MC_MoveVelocity 指令触发的轴的运行
『注意』部分输入/输出管脚没有具体介绍,请用户参考 MC_Power 指令中的说明
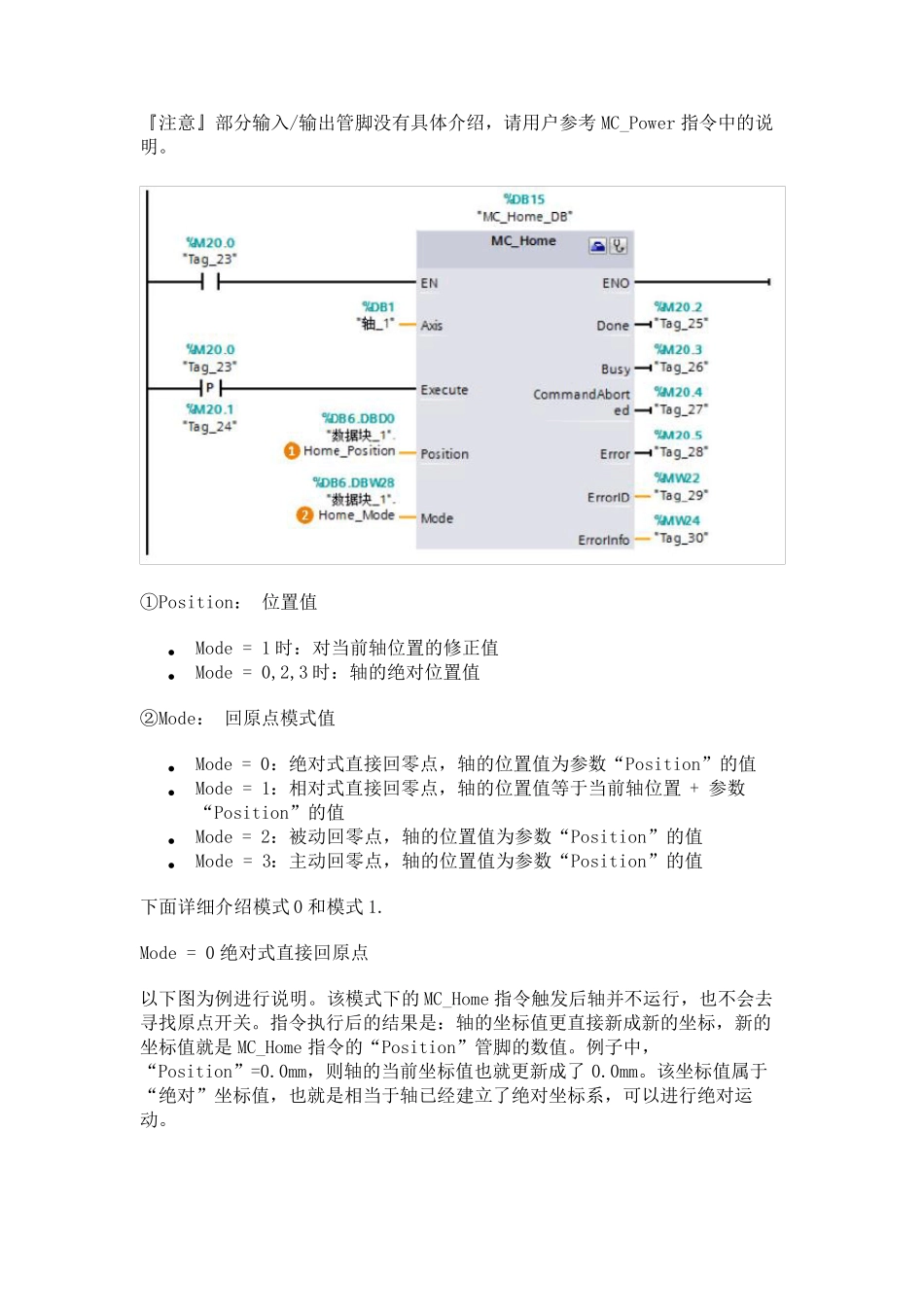
MC_Home 指令名称:回原点指令 功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配
使用要点:轴做绝对位置定位前一定要触发 MC_Home 指令
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power 指令中的说明
①Position: 位置值 • Mode = 1 时:对当前轴位置的修正值 • Mode = 0,2,3 时:轴的绝对位置值 ②Mode: 回原点模式值 • Mode = 0:绝对式直接回零点,轴的位置值为参数“Position”的值 • Mode = 1:相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值 • Mode = 2:被动回零点,轴的位置值为参数“Position”的值 • Mode = 3:主动回零点,轴的位置值为参数“Position”的值 下面详细介绍模式0 和模式1
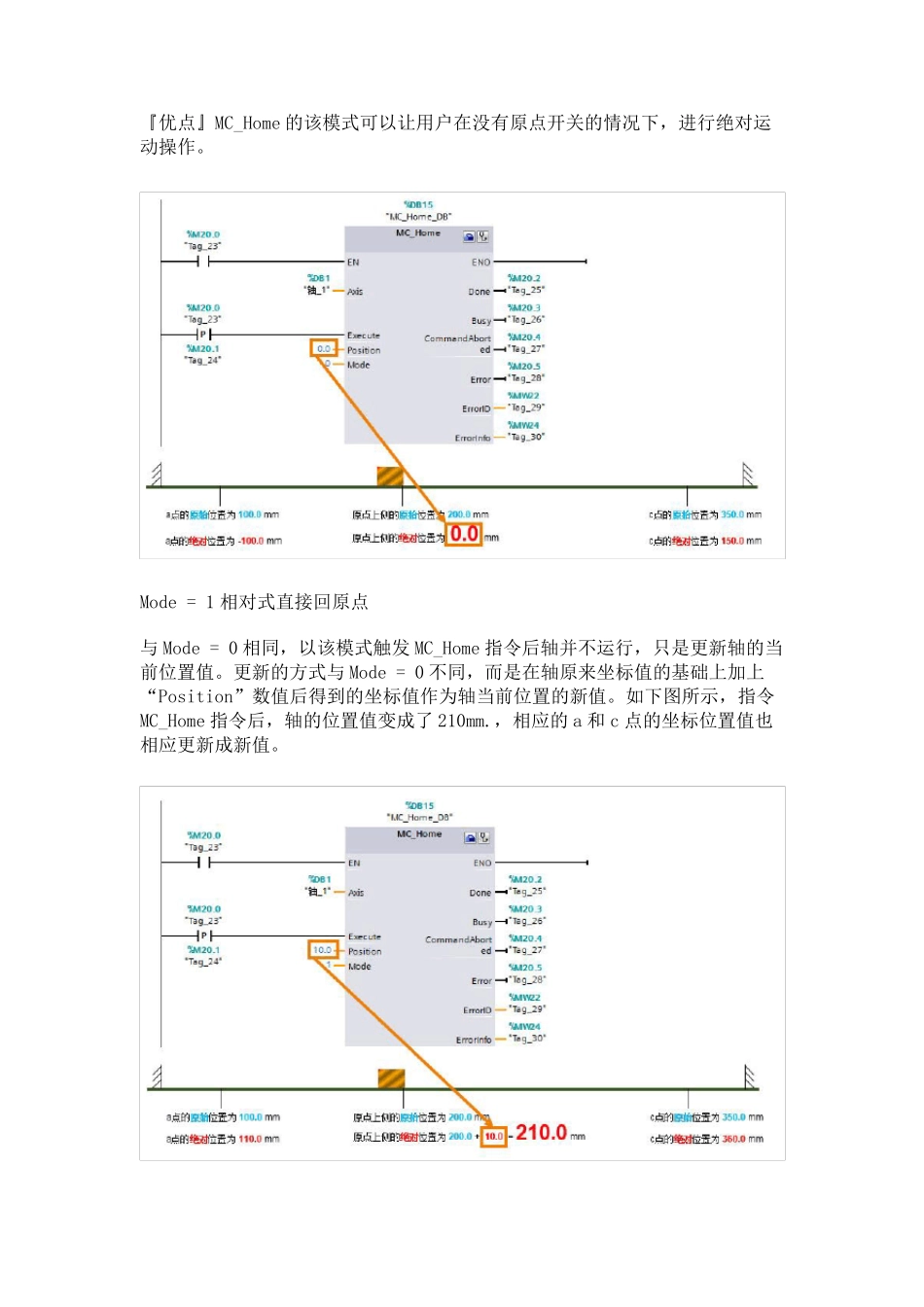
Mode = 0 绝对式直接回原点 以下图为例进行说明
该模式下的MC_Home 指令触发后轴并不运行,也不会去寻找原点开关
指令执行后的结果是:轴的坐标值更直接新成新的坐标,新的坐标值就是 MC_Home 指令的“Position”管脚的数值
例子中,“Position”=0
0mm,则轴的当前坐标值也就更新成了 0
该坐标值属于“绝对”坐标值,也就是相当于轴已经建立了绝对坐标系,可以进行绝对运动
『优点』MC_Home 的该模式可以让用户在没有原