1急停开关在按下急停开关后,只允许由获得授权且接受过相关培训的员工将机器人系统重新投入使用
该员工必须在事先就确切知晓所处状态以及自己会引发的后续运动
急停的后果在按下急停开关后,机器人驱动以及与其相连的运动单元将会立即停止
计算机仍然保持工作状态
根据所选取的运行模式,会以不同方式处理急停状态
中止或继续过程如果通过急停开关中断了一个定位过程,在排除急停缘由之后开通动力并按下“启动”键便可以继续运行
若要中止,在“手动低速T1”运行模式下,按下“ESC”键
在“自动”或“手动高速T2”运行模式下,只需切换到“关”运行模式即可
采用相同方式也可以处理由驱动过载(控制变数误差)所导致的急停操作
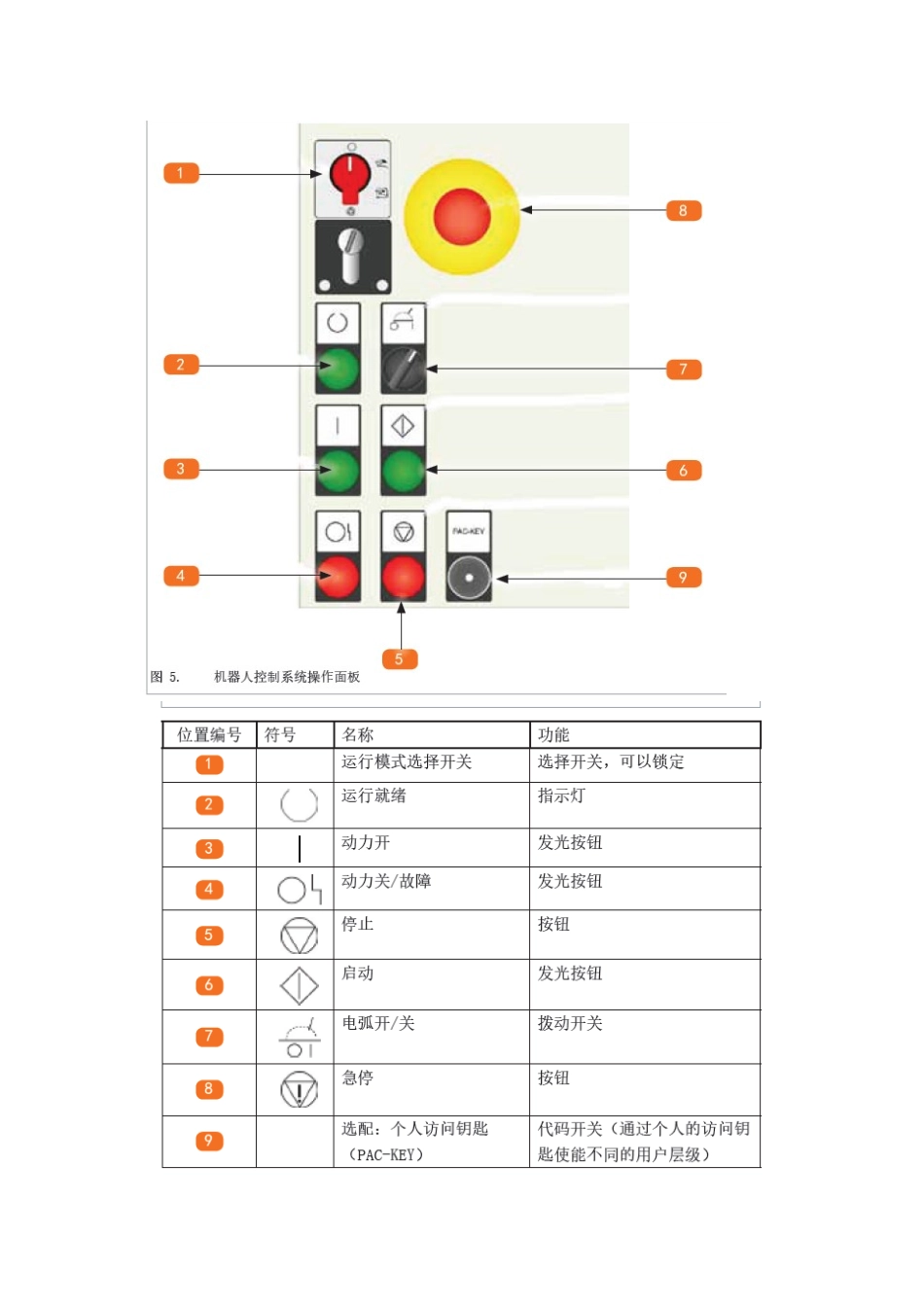
2运行模式选择开关在操作面板上装有运行模式选择开关
选择开关可额外通过钥匙开关进行锁定
通过该运行模式选择开关可以选取各种运行模式
编程人员可在任何一种运行模式下拔出钥匙,防止选取计划之外的运行模式
若在机器人运动的过程中更换运行模式,机器人将会停止,并发出相应的出错提示消息
QIROX机器人控制系统有四种基本运行模式
运行模式选择开关的位置:关手动低速T1手动高速T2自动运行模式“关”在实施机器人机械机构的保养工作时,需要采取措施保护维修和保养人员(锁定开关和拔出钥匙)机器人驱动的动力供给切断键盘和示教器输入失效按下“制动器松开”键,可以手动移动机器人轴(参见章节“8
手动移动机器人机械机构”,第31页”)“手动低速T1”运行模式此运行模式仅允许有资格的人员使用(在保护范围内不得有人员逗留)受监控的最大笛卡尔位移速度(在TCP处测得)为250mm/s
通过“Vmax”按键减速
只有按下许可键和位移键(在TEACH(示教)或PROG(编程)模式下),才能接通机器人驱动
停止操作十秒钟,机器人驱动自动停止
顺序程序完成创建和测试在流程运行过程中,可以对先前已在程序中定义的