课 题 基本图形编程练习 目 的 与 要 求 知识目标:掌握机器人直线、圆弧、关节指令的含义
能力目标:能利用机器人进行示教板零件的编程及调试 素质目标:养成遵守工业机器人操作规范的良好品德;培养团队合作、与人交流、善于沟通的品质
重 点 ABB 工业机器人直线、圆弧、关节指令与编程 示教板零件编程 难 点 ABB 工业机器人直线、圆弧、关节指令与编程 教 具 工业机器人相关应用视频 工业机器人仿真软件 复 习 提 问 RAPID 程序的组成
新知识考查点 基本图形编程练习 布置作业 课后回忆 备注 教员 教研室 主任批阅 二级 院长 复习提问: RAPID 程序的组成
项目名称:基本图形编程练习 课题引入:通过观看示教板零件编程的视频,提出工业机器人常用的运动指令,进行示教板零件的编程
本节重点:掌握机器人直线、圆弧、关节指令的含义,学会采用机器人对示教板上典型零件的编程,按照小组(2 人)方式进行,布置任务,完成任务后在课程平台提交本单元的相关任务
第一步:提出问题: 1、工业机器人在喷涂及焊接等领域应用特别的广泛,提出机器人基本的编程指令,提出利用基本常用的指令对示教板零件进行编程
第二步:自主学习 学生根据教材的内容和视频资料等资料,进行自主学习, 记录在学习过程中存在的问题,并进行小组和老师的讨论
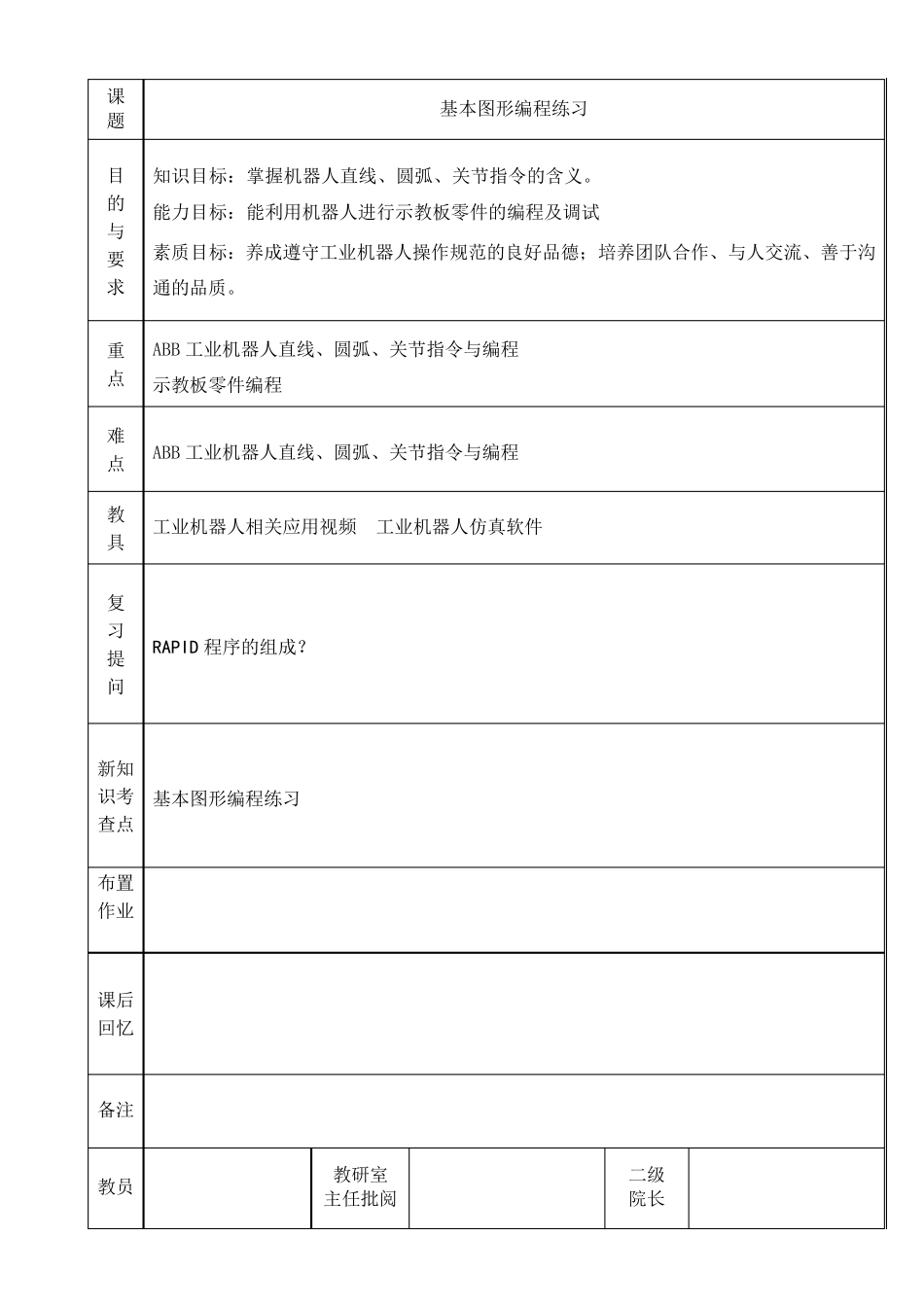
(对媒体辅助法、讨论法) (1)关节运动指令 关节运动指令是对路径精度要求不高的情况下,工业机器人的工具中心点TCP从一个位置移动到另一个位置,两个位置之间的路径不一定是直线,如图5-1
图5-1 关节运动 MoveJ 指令解 析 见 表 5-2: MoveJ p10, v1000, z50, tool1\Wobj:=wobj1; 表 5-2 MoveJ 指令解 析 参 数 含义 p10 目标 点位置数 据 关节运动适 合 机器人大 范 围 运动时 使