智能小车(红外版)项目报告目录一、 引言------------------------------1二、 总体方案------------------------------1三、 电路与程序设计------------------------------4四、 小车调试方案和调试成果------------------------------8五、 碰到的问题和解决方案-------------------------------9 六、 工程管理方案-------------------------------10七、 总结和体会-------------------------------10一、 引言智能,即能够按照预先设定的模式在一种环境中运行,不需要人为的管理
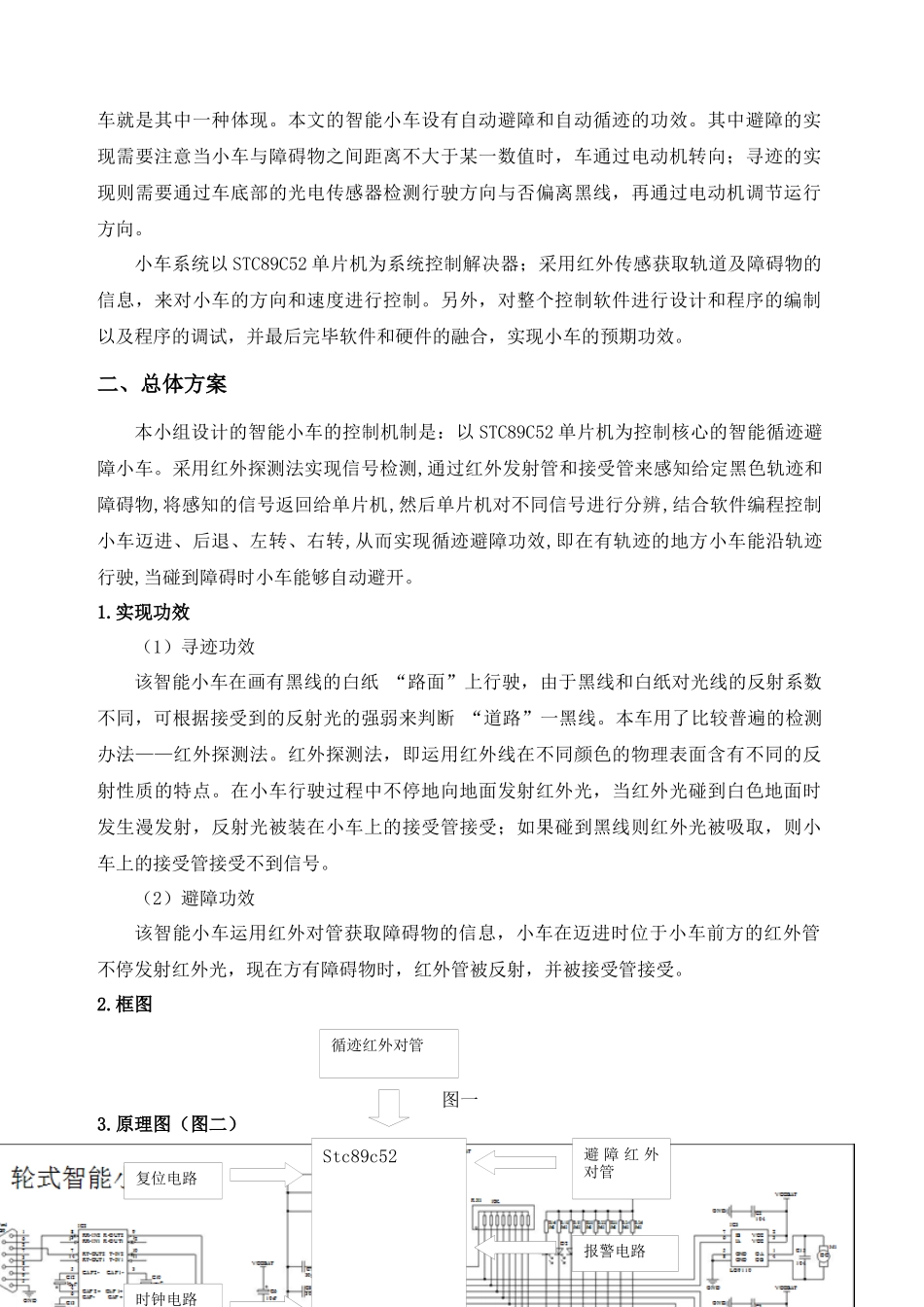
智能小Stc89c52循迹红外对管时钟电路复位电路报警电路避 障 红 外对管车就是其中一种体现
本文的智能小车设有自动避障和自动循迹的功效
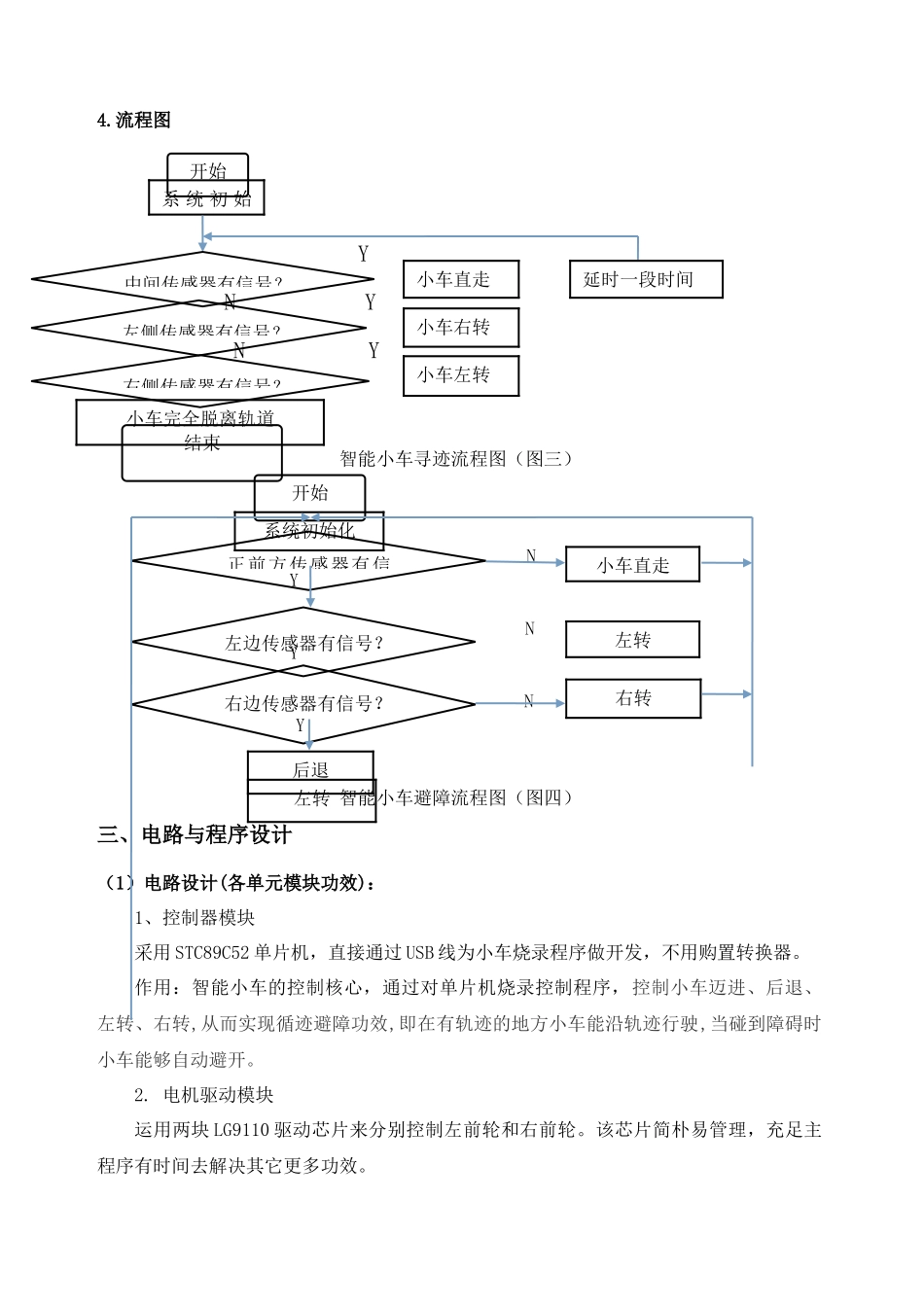
其中避障的实现需要注意当小车与障碍物之间距离不大于某一数值时,车通过电动机转向;寻迹的实现则需要通过车底部的光电传感器检测行驶方向与否偏离黑线,再通过电动机调节运行方向
小车系统以 STC89C52 单片机为系统控制解决器;采用红外传感获取轨道及障碍物的信息,来对小车的方向和速度进行控制
另外,对整个控制软件进行设计和程序的编制以及程序的调试,并最后完毕软件和硬件的融合,实现小车的预期功效
二、总体方案本小组设计的智能小车的控制机制是:以 STC89C52 单片机为控制核心的智能循迹避障小车
采用红外探测法实现信号检测,通过红外发射管和接受管来感知给定黑色轨迹和障碍物,将感知的信号返回给单片机,然后单片机对不同信号进行分辨,结合软件编程控制小车迈进、后退、左转、右转,从而实现循迹避障功效,即在有轨迹的地方小车能沿轨迹行驶,当碰到障碍时小车能够自动避开