第十节导盲机器人(一)小明是位盲人学生。父母由于工作关系,不能天天接送小明上学,这该怎么办?小明的父母为小明定做了一台导盲机器人,让...

新杨中学模型机器人校本教材第一章模型机器人介绍在本章中我们学习了解模型机器人常见的的几种系列,以及每种系列机器人的特点。同学们可以...
机器人技术与系统国家重点实验室开放研究基金课题申请书课题名称:___________________________________________申请者:_________________...
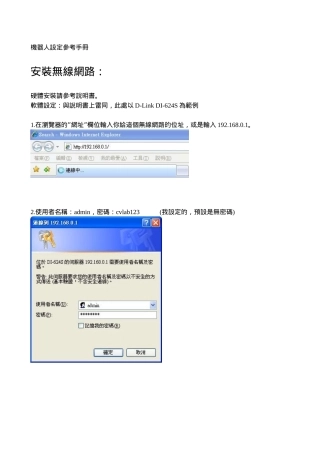
機器人設定參考手冊安裝無線網路:硬體安裝請參考說明書。軟體設定:與說明書上雷同,此處以D-LinkDI-624S為範例1.””在瀏覽器的網址欄位...

机器人模块拆装实训报告班级:学号:姓名:一、课程目的1、锻炼动手能力和团队精神;2、系统训练创新能力和实践能力;3、认识小型机器人硬...
工业机器人手臂的静态平衡第一部分:平衡离散IonSimionescu*,LiviuCiupituMechanicalEngineeringDepartment,POLITEHNICAUniversityofBuchar...

飞信预置机器人逻辑设计文档飞信预置机器人飞信产品管理部2009年05月15日修订历史A-增加M-修改D-删除版本时间修订人描述V1.02009-05-15张卫...

摘要:本文介绍了高压输电线巡线机器人控制系统,实现了高压输电线巡线机器人的越障、线路检测、实时监控等功能。实验结果表明该系统运行良...
上海大学本科学士学位毕业设计论文激光导航运载机器人运行环境和引导环境的中文动态画面输入软件作者:查嵩炜学号:99103666专业:计算机科...

毕业设计外文资料翻译学院:理工学院专业:电气工程及其自动化姓名:师帅学号:051601312外文出处:ExpertSystemswithApplications36(2009)...

论文题目:直进轮式机器人行走机构的设计完成日期:指导教师签字:答辩小组成员签字:摘要随着科技的不断发展,对于外星球与未知地域探索的...

近距离机器人接触体验『2005年机器人挑战赛』3月5日广州正式开赛(本报讯)国内规模最大,技术水平最高,娱乐参与性最强的机器人比赛『2005...
文件编号:Q/SIERT/JB—15—2011ABB机器人基本操作规范版本:A受控状态:发放编号:持有者:编制:2011年月日审核:2011年月日批准:2011年...

(CylinderHead)现代机器人操作培训指导书Hi4/Hi4a操作培训指导书1.基本操作1.1.系统概述机器人被分为两部分,一个是机器人本体,另一个是控...
浙江工贸职业技术学院毕业设计(论文)课题名称:机器人手臂机构系部:汽机系专业:机电一体化班级:机电041班姓名:王文中学号:041020112...

弧焊机器人焊缝跟踪方法的研究现状随着科技水平的进步,人们对焊接质量的要求也越来越高。而人工焊接时,由于受到技术水平、疲劳程度、责任...
灭火机器人设计沈阳工程学院课程设计设计题目:灭火机器人设计I灭火机器人设计系别自控系班级测控本091学生姓名庄国庆学号2009308126指导教...

機器人傳輸系統關鍵技術高精度微驅動系統的選取(以Maxon無鐵芯式/無槽式直流馬達及控制器為實驗案例)【主辦單位】:經濟部工業局【執行單位...

博士生课程空间机器人关键技术1空间机器人概述2数学力学基础3冗余自由度机器人4柔性机械臂5欠驱动机器人6机器人灵巧手(一)空间机器人的概...
摘要随着科技的发展和工业需求的增加,焊接技术在工业生产中所占据的分量越来越大,而且焊接技术的优良程度直接影响着零件或产品的质量。国...