数据融合技术的研究方法及现状 学科专业:模式识别与智能系统 姓 名:高鸽 学 号:S20110399 日 期:2012年 4月 1 常用数据融合方法 多传感器数据融合涉及到多方面的理论和技术,如信号处理、估计理论、不确定性理论、最优化理论、模式识别、神经网络、人工智能、小波分析理论和支持向量机等
很多学者从不同角度出发提出了多种数据融合技术方案
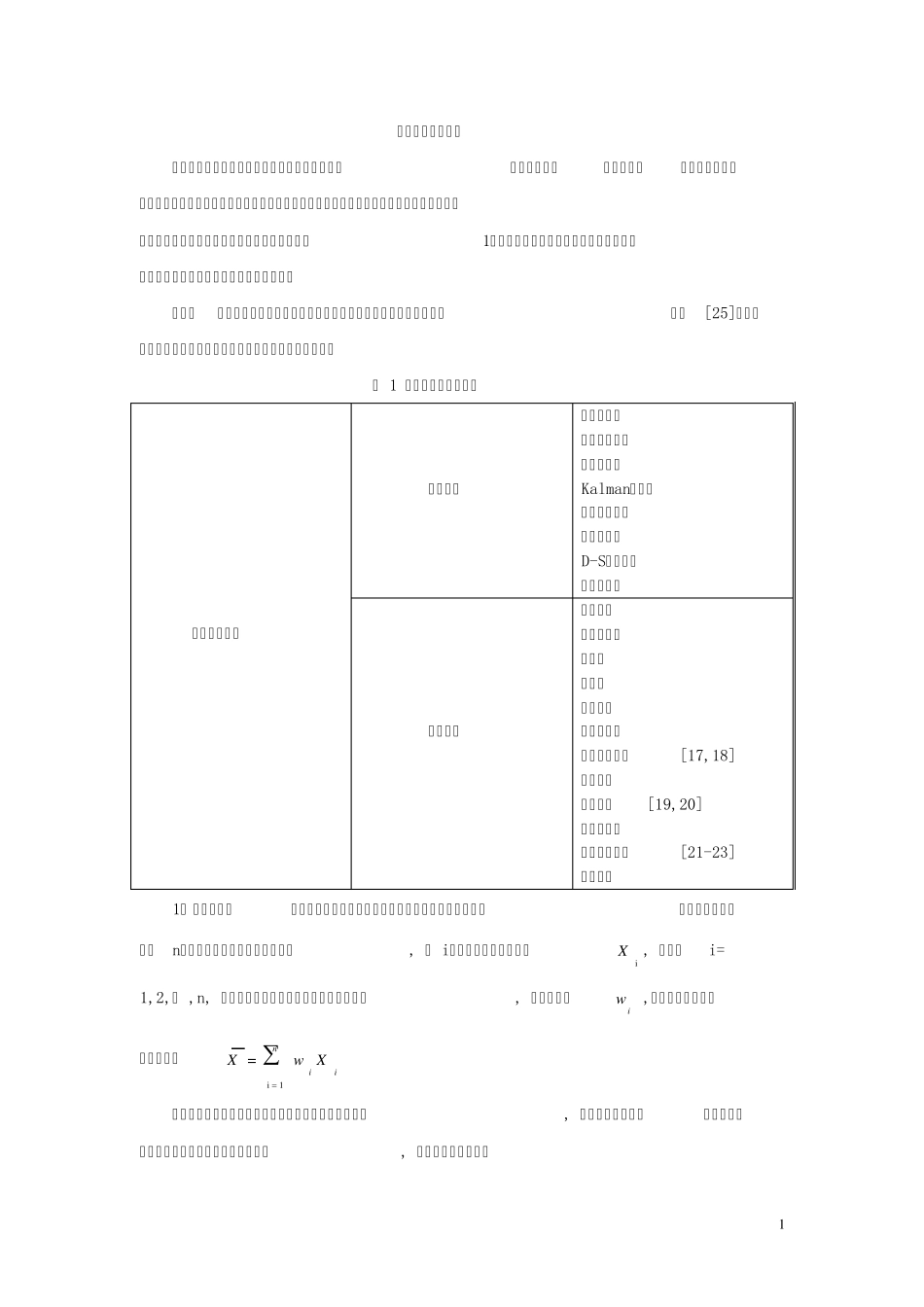
表1对现有比较常用的数据融合方法进行了归纳,主要分为经典方法和现代方法两大类
目前,人们已开始将多传感器信息融合应用于复杂工业过程控制系统,文献[25]提出的复杂工业过程综合集成智能控制系统便是其中的一种
表 1 常用的数据融合方法 信息融合方法 经典方法 加权平均法 极大似然估计 最小二乘法 Kalman滤波法 贝叶斯估计法 经典推理法 D-S证据理论 品质因数法 现代方法 聚类分析 逻辑模板法 熵理论 表决法 模糊逻辑 产生式规则 模糊集合理论[17,18] 遗传算法 神经网络[19,20] 粗糙集理论 小波分析理论[21-23] 专家系统 1) 加权平均法 加权平均法是最简单直观地实时处理信息的融合方法
基本过程如下: 设用n个传感器对某个物理量进行测量, 第 i个传感器输出的数据为iX, 其中,i= 1,2,„ ,n, 对每个传感器的输出测量值进行加权平均, 加权系数为iw ,得到的加权平均融合结果为:i1=niiXwX 加权平均法将来自不同传感器的冗余信息进行加权平均, 结果作为融合值
应用该方法必须先对系统和传感器进行详细分析, 以获得正确的权值
2 2)极大似然估计 极大似然估计是静态环境中的常用方法,能将信息融合取为使似然函数得到估计值
3) Kalman 滤波 Kalman 滤波用于动态环境中冗余信息的实时融合
对线性模型系统, 且噪声是高斯分布的白噪声, 可获得最优融合信息统计
非线性模型, 可采用扩