行星齿轮变速器设计 一 行星传动 行星齿轮传动类型很多,最简单的是由太阳轮、齿圈、行星架和支架上自由行星齿轮组成
图 1 行星齿轮机构简图 1
1 行星齿轮传动学 如图(1a)所示,给整个行星排附加一个与行星架转速cn 大小相等方向相反的牵连速度,对构件的相对速度不变,则行星排变为定轴式传动,可得: (sn -cn )/(Rn -cn )=-Rz /Sz =- (1) 式中,sn 、Rn 分别为太阳轮转速和齿圈转速;Sz 、Rz 分别为太阳轮齿数与齿圈齿数; 为行星排参数, =Rz /Sz ,通常取 4/34
由式(1)得到单行星排三元件的转速特性方程为: sn +Rn -(1+ )cn =0 (2) 式二是三元一次齐次方程,三个未知数清楚反应了单排是二自由度机构,这也正是其与一自由度定轴式不同之处
3 构件中任意两者之间均无固定的转速联系,必须加一个约束条件(用制动件 B 使其一固定,n=0)或用离合器 C 连接二者以同一转速旋转,才能获得确定的传动比gi
同时还可以看出方程的 3 个系数之和为 0
这说明单行星排具有用离合器把其中任意两个元件闭锁,使行星排整体转动的特性
这就是说单行星排的输人与输出轴可实现减(超) 速 、等速或反转(倒挡),即两个前进一个倒车的 3 个排挡
对于太阳轮经过两个相互啮合的行星齿轮才与齿圈相连的双行星排,在行星架不转时,因太阳轮与齿圈旋转方向相同
故在式(2)中,以“- ”代替即可
其 的应用范围比单行星排扩大了,且能以较少的齿轮组成变速器排挡
但结构复杂,难加工,装配精度要求更高
2 行星传动动力学 在稳定的转速下,不计摩擦损失分析 3 元件的内部理论转矩
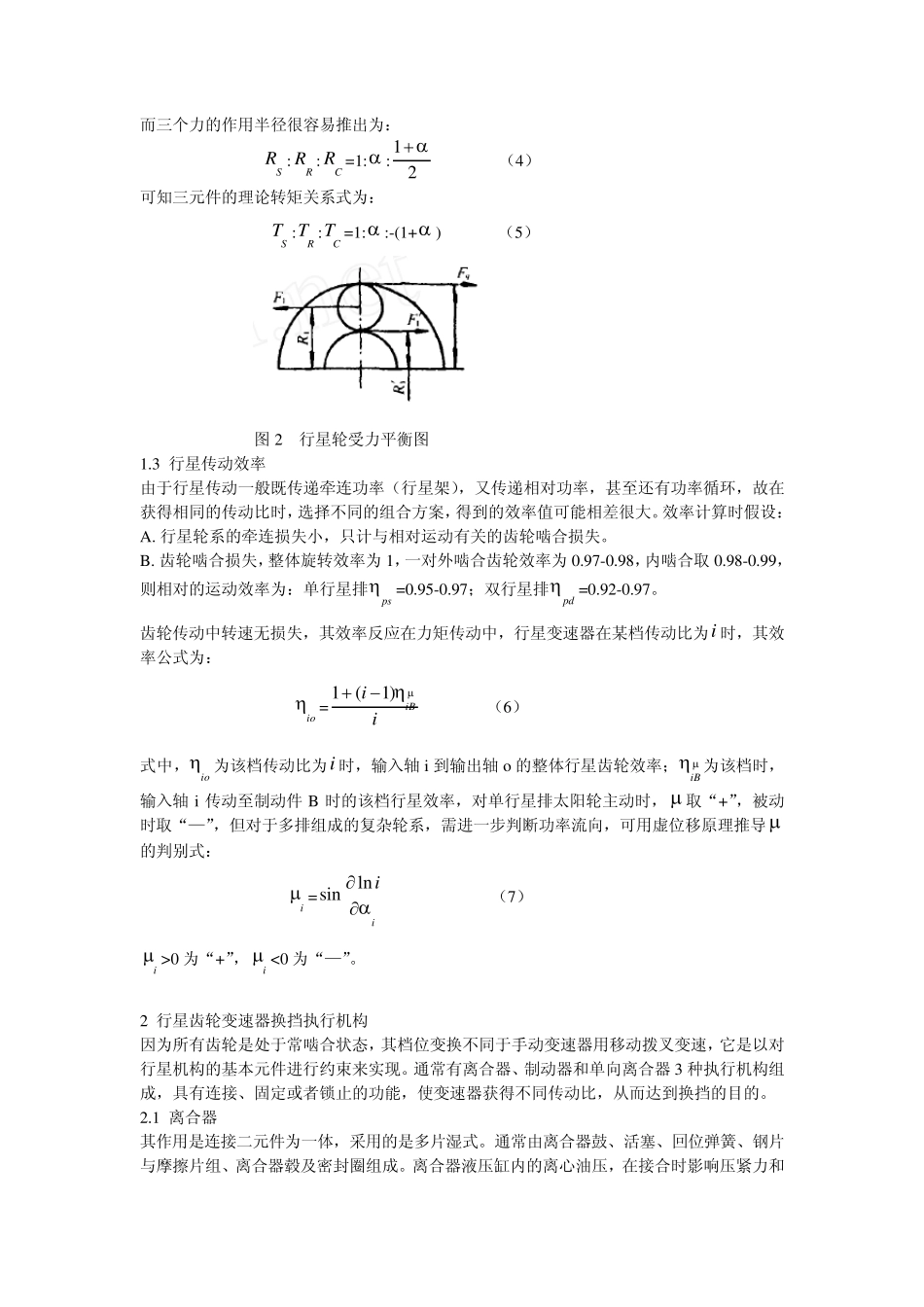
由行星齿轮的平衡条件,得到各力之比为: SF :RF :CF =1:1:(-2) (3) 而三个力的作用半径很容易推出为: SR :RR :CR =1