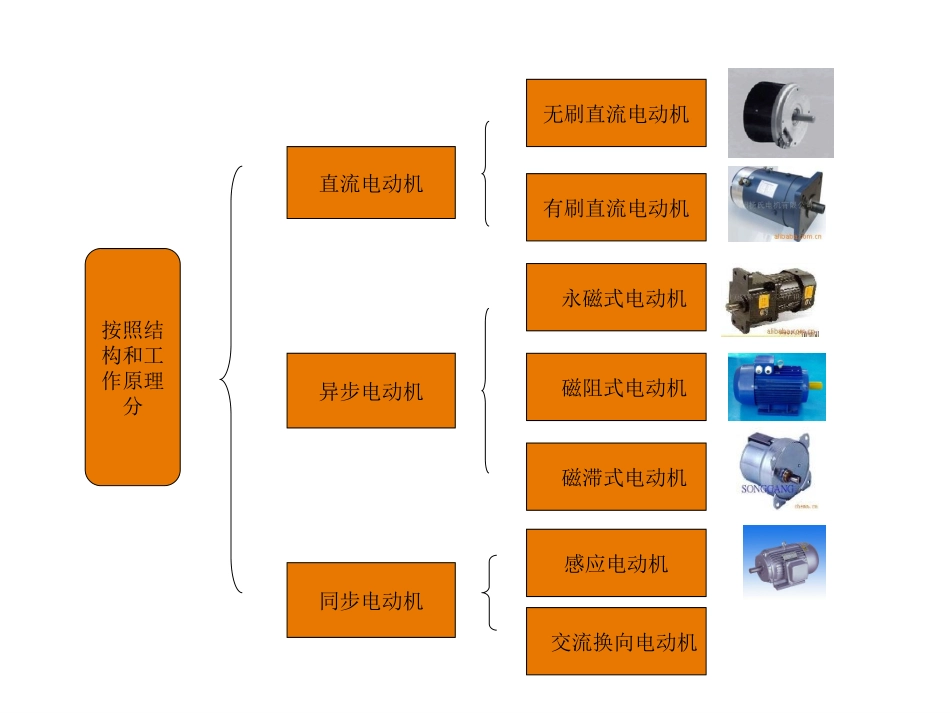
电动机选择基础电动机分类按照电源类型分类直流电机交流电机单相电机三相电机按照结构和工作原理分直流电动机异步电动机永磁式电动机磁阻式电动机同步电动机磁滞式电动机感应电动机交流换向电动机有刷直流电动机无刷直流电动机按起动与运行方式分类电容起动式单相异步电动机电容运转式单相异步电动机电容起动运式单相异步转电动机分相式单相异步电动机按用途分类驱动用电动机控制用电动机电动工具用家电用通用小型设备步进电机伺服电机电机内部运动形式分类旋转电机直线电机以上是电动机的常见分类方式
我们常用的电动机是步进电机与伺服电机
后续的内容主要关注这两种电机,并简要介绍普通交流电机和直线电机
步进电机特点步进电机是一种用电脉冲信号进行控制,并将电脉冲信号转换成相应的角位移或线位移的控制电机
它每接收一个电脉冲,转子就转过一定角度,称为步距角
由于这种电机的转动是断续地一步步进行的,所以被称为步进电动机
电机的旋转角度与输入脉冲数成正比例,因而电机转速取决于输入脉冲频率
在非超载的情况下,电机的停止位置只取决于信号的脉冲数,转速只取决于信号的脉冲频率,而不受负载变化的影响,因此控制位置、控制速度都很很简单而且准确,并且步进电机只有周期性的误差而无累积误差
因而通常被用作定位控制和定速控制
步进电机有惯量低、定位精度高、无累积误差、控制简单等特点
一般步进电机的精度为步距角的3-5%,且不累积
步进电机外表允许的最高温度因电机采用的磁性材料不同而有差别,一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度也可以正常工作
步进电机的力矩会随转速的升高而下降
步进电机不能超载运行,否则就会出现丢步堵转过冲等异常
步进电机选型参数这是东方马达(OrientalMotor)的步进电机选型参数摘录
从机械设计的角度来说,需要关注的是保持转矩、转子转动惯量